GYSFFMANC(MT3333)が定期的に受信できなくなる
秋月で売っているGYSFFMANC(MT3333) GNSSモジュールがおかしい。
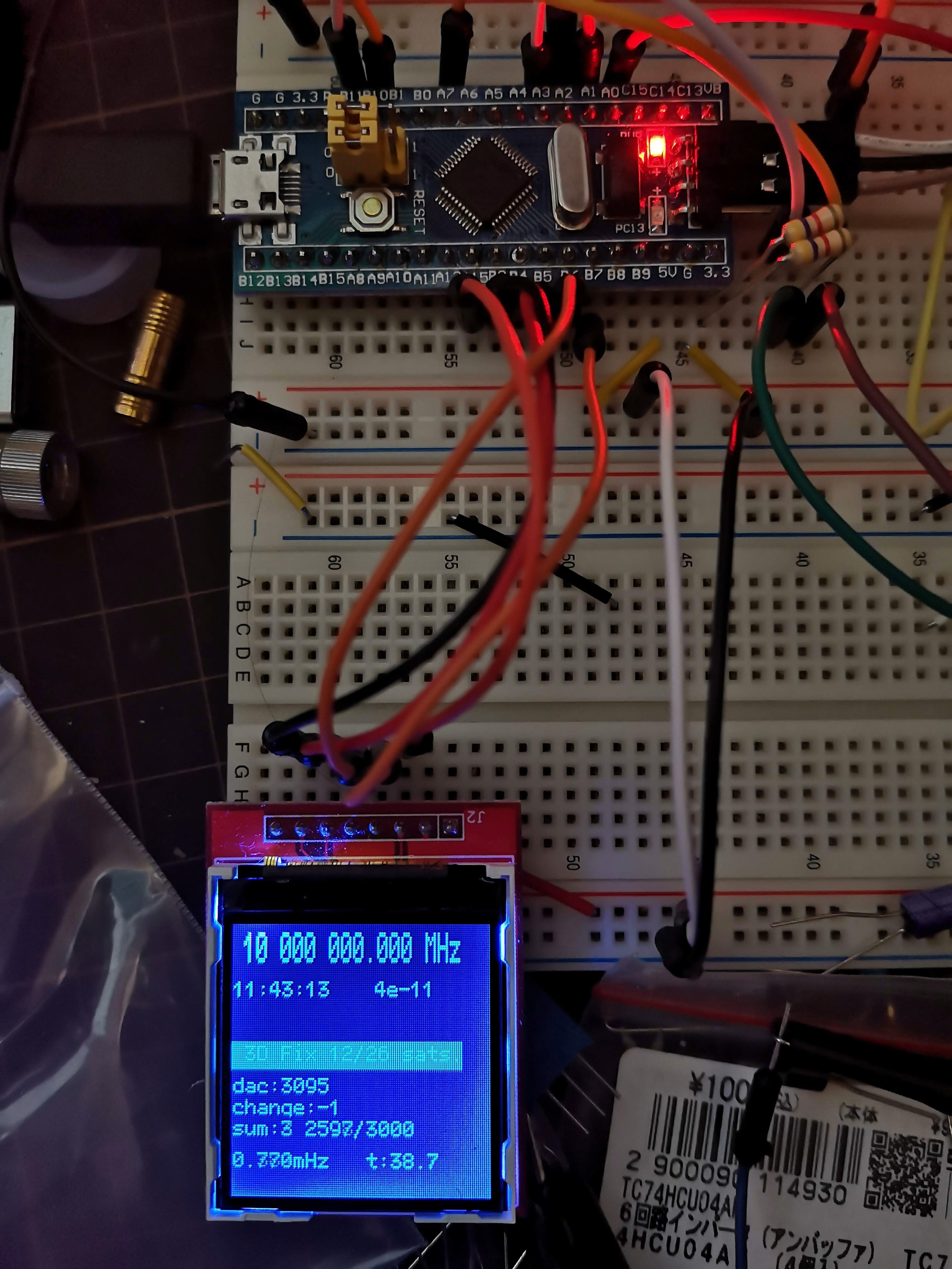
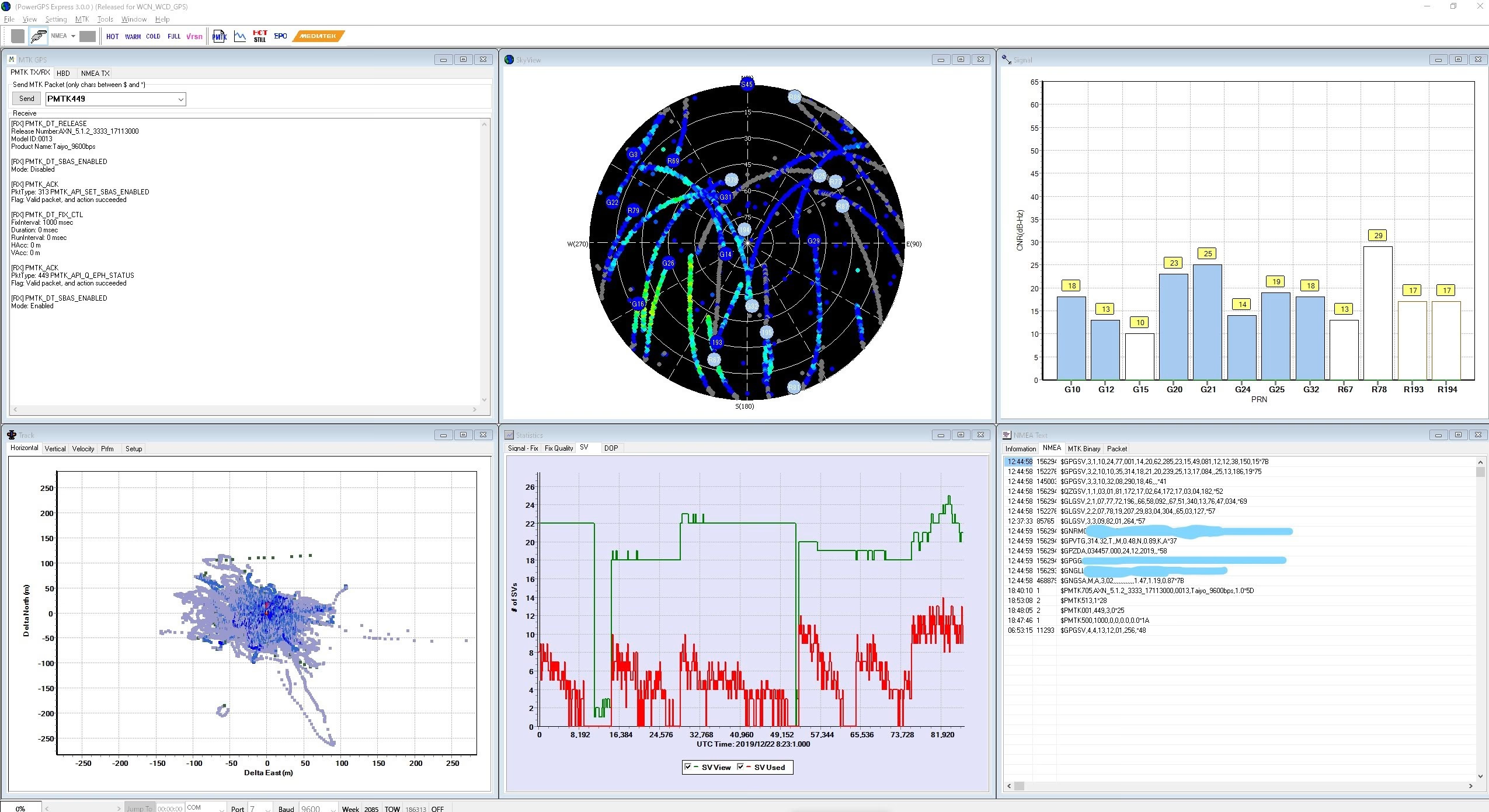
中央下のグラフを見るのがわかりやすいが、定期的に (衛星が見えているにも関わらず) 一切受信できなくなり、しばらくすると回復するという挙動をする。なので全く安定して受信できない。
- 少しずつ SV Used が減少しはじめ、3D Fix を維持できなくなる。SV View はほぼ変化しない
- リセットから3〜4時間経過すると一切受信できなくなる
- そこからしばらくすると、再び受信できるようになる
- 上記の挙動を繰替えす
- 一切受信できなくなったタイミングで手動でリセット・ホットスタートすると即座に 3D Fix される。これよりアンテナの問題ではないと考えられる
- ほぼ同じ位置に別のアンテナをつけ、別の受信機(ublox NEO M8N) をつかって測位しているが、そちらではこのような現象は起きない。衛星の見える環境の問題ではないと考えられる
その他の情報
- バージョンは AXN_5.1.2_3333_17113000
- GPSとGLONASS で測位。SBAS の有効・無効は関係なく再現する。
- GLONASS は表示にはでるが測位に使われている形跡がないように思う。
考察
ゴミなのでは? とりあえず使用に耐えないので買って損してイライラするが、挙動について考えてみる。
- 衛星のエフェメリス情報の有効期限が4時間なので、周期と似ていて怪しい
- 3D Fix した状態だと捕捉している別の衛星の情報を一切処理しないとか?
- 特定の環境でだけ再現する可能性がある?
- 受信環境が悪い、かつ既に 3D Fix 状態だと他の衛星を無視するとか?
- ファームのバグ (メモリリークみたいな?)
- メモリリークとかでスタックするならリセット後にメッセージが出て、それが記録されると思うが、それは観測できない
よくわからんけど、とりあえずこのモジュールはおすすめできない。中国の怪しい GNSS モジュールのほうがはるかに安定している……
関連エントリー
- NMEA ログから衛星のスカイビューを生成する 既にある NMEA のログから、どの衛星が強く受信できているかをプロットしてみる。 ファイルを指定して png を書き出すコードを node...
- GNSS アンテナの設置 安定して GPS 信号を受けたいなあとう漠然とした考えからTOPGNSS の GN-GGB0710 というのを買ってみた。いわゆる2波対応ア...
- PCモニタに画面が出ないと思ったら スリープ復帰時にどうやってもモニタが付かず、モニタの電源を入れなおしたり、ケーブルを繋ぎなおしたりということをしてみた。しかし、どうしてもダ...
- h3のサーバが不安定なのでGSOをオフにしてみる VPS 上の h2o サーバの h3 接続が不安定に。手元から curl しても、https://http3check.net/ を使っても...
- 気圧・温度・湿度 I2C センサー BME280 まず BME280 と BMP280 というよく似たやつがあるので注意…。 BMP は気圧と気温しか測れない。 初期設定 リセット直後の B...