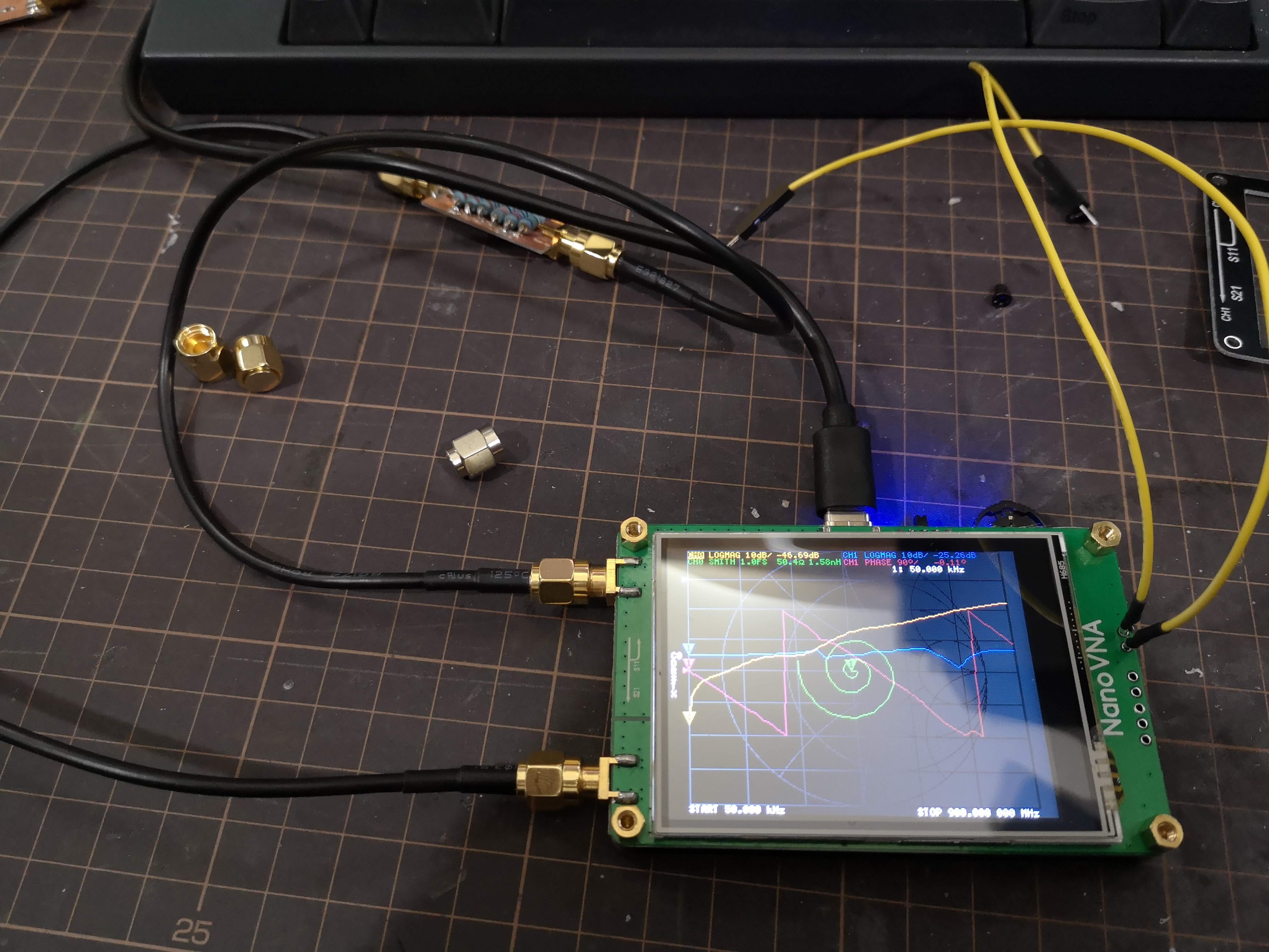

NanoVNA という非常に小型で低コストのスタンドアロン VNA (ベクターネットワークアナライザ) がにわかにグローバルで流行している。VNA は高周波回路設計・実装に必須の測定器のひとつだが、もともと非常に高価なため、個人でちゃんとしたメーカーものを所有することはまずない。たとえ低価格と言われるものでも数万円〜だった。それがさらに低コストで使える性能であると評判なので、VNA の民主化だというおもむき。
NanoVNA の設計のオリジナルはTT (ttrftech) さんという日本語でブログも書かれているかたの設計のもの。自分もハムフェアかMaker Faireかで実機をちらっと見たことがある気がする (もしかするとVNAではなく後続プロジェクトのSDRのほうだったかもしれないが)。少量のキット化までされていたが、これを hugen79 さんが手を加えてしPCBアートワークなどをやりなおして売っているようだ (もともとPCBの設計はソースに含まれてない)。ファームにも独自のコードが入っている。
aliexpress などでは、hugen79 版を元にした (おそらく) さらにこれのクローンと思われるものが非常に安価に売っている。hugen79 レポジトリの README では、粗悪なものがあって性能が出ないことがある (ミキサーまわりに齟齬があるらしい? シールドの有無など違いもある) けど、本来の性能じゃないから買う側でちゃんと調べろや、ということが書いてある。
自分には技術レベル的にVNAは必要ないが、VNAとして使わなくても、これはそのままアンテナアナライザーにもなるわけで、もはや自作するより良さそうだ。
ちなみに2ポートのうちCH0だけ反射を計測できるので、繋ぎかえて測定してマージしないと s2p 相当の結果を得られない。(S11 S21 を得て、繋ぎかえて S11、S21をS22 S12 に読み替える) 入出力が全く同じで対称の受動コンポーネントなら S22=S11 S12=S21 としてもまぁいいのかも (VNA使ったことないので温度感がわからない)。
基本的な使いかた
- 周波数の範囲を決める (範囲内の固定 101 ポイントを測定する)
- キャリブレーションする
- RESET してから、CAL を順番に実行していく
- 被測定物を繋ぐ
特定のよく使う周波数範囲に関してはキャリブレーション済みの状態を保存できる。
PCソフトウェア
オリジナル版だと python による実装があり Jupyter Notebook から呼びだすような例が書いてある。
それとは別に hugen79 開発の C# ソフトウェアが存在している。ただしこれはOSSではない。
デバイスとの通信は USB CDC によるもので特に難しさはなさそう。main.c を見れば実装はわかるし、python 実装を読めばホストインターフェイスは容易に書けそう。ただ細かいことをやろうとするとホスト側で信号処理をやらないといけない。
逆に USB CDC しかないので雑に BLE シリアル化みたいなのはちょっと面倒そう。MCU から使ってないピンを引き出してUARTに割り当てたらいいのかも。
ファームウェア
販売されているものに入っているファームウェアは店によって違うっぽい。hugen79 ファームが入っているようだが、これにはいくつか種類がある。上限周波数とアンテナアライザーに特化しているかどうかの違いらしい。いまいち違いがわからないのでコードを読んでみたが、上記レポジトリには上限周波数のフラグはあってもアンテナアライザー特化版フラグが入ってなさそう。謎。
ttrftech ファームも割と最近には上限を900MHz までとする高調波拡張が入っているみたい。(ブランチには1.5GHzまでの拡張もある)
ということで何らかの変更を入れる場合どっちからフォークするかは悩ましい。github を検索すると FreeRTOS バージョンのコードもあったりする。hugen79 版はオリジナルから定期的にコードを手動でマージしているみたいなので、特に必要がなければオリジナルにPRを作ったほうが良さそうかな。
SRAM がギリギリなのであまり高級な機能は入れにくい。可能なら宣言済みのバッファをうまく利用したい。
ファームウェアの歩きかた
ブロックダイアグラムをまず見とく。全体でやってることは難しくなくて、クロックジェネレータ・ミキサ・ステレオオーディコーデック・MCU をうまく組み合わせてあまり部品数を増やさずに構成されている。
MCU は STM32F072C8T6 (Coretex-M0 48MHz / 16KB SRAM / 64KB Flash)
STM32F072CBT6 (Coretex-M0 48MHz / 16KB SRAM / 128KB Flash) でした。
ファームウェア側は RTOS として ChibiOS が採用されている。
シェルまわり
USB CDC のシェルは ChibiOS の shell 機能で実装されている。main.c に定義がある。
すべての機能がシェルから呼べるようになっているので、�機能から見るなら基本は main.c を起点にして該当コードを探すのが読みやすいと思う。
信号入力まわり
- TLV320AIC3204 (ADC) を初期化
- STM32 の I2S は常時起動しており i2s_end_callback() が呼ばれている
- dsp_process() で現在の値をある程度計算してグローバルに保持する
があったうえで、別スレッドで
- オシレータの周波数を設定
- ADC のチャンネルを選択して DSP が安定するのを待つ
- calculate_gamma() でΓを求める
がスイープにあわせて実行されている。
レンダリングまわり
ベクトルネットワークアナライザNanoVNAの液晶画面を実装する このエントリにおおまかな実装概要が書いてある。コードは plot.c だがメモリが少ないのを工夫して実装してあるので難しい。ちゃんと読んでない。トレース結果とかの状態をグローバルに保持しつつ、再描画が必要な領域に dirty フラグ (mark) を立てて、draw_cell() が実際に特定の領域のピクセル情報をつくってディスプレイに送っているみたい。
-
トップ
-
tech
-
中華 NanoVNA ってなんなのか? またはファームの歩きかた
-
トップ
-
nanovna
-
中華 NanoVNA ってなんなのか? またはファームの歩きかた

.png)