4ch 分の音量を一括で変更したいと思ったが、4連ボリュームというのは入手性が極めて悪く、市販の2連ボリュームを改造して4連にしたりするようだ。
ということでそもそもアナログボリュームをやめてデジタルポテンションメータを使うことを検討しはじめた。デジタルボリュームならギャングエラーも少ないし、多チャンネル化もしやすい。インターフェイスも自由にできる (といってもアナログBカーブボリュームをADCして4ch分可変させる予定だが)
LM1972
秋月で売ってる中から選ぶと、実質的にはこれしかない。1つで2チャンネル分。これを使ってひとまず2ch分を作ってみる。
実装
回路図
.png)
後段のオペアンプは実際は手元にあった OPA2134 を使っている。単電源でも使えるが、今回は正負電源を用意する予定なのでVSSとGNDはわけてある。
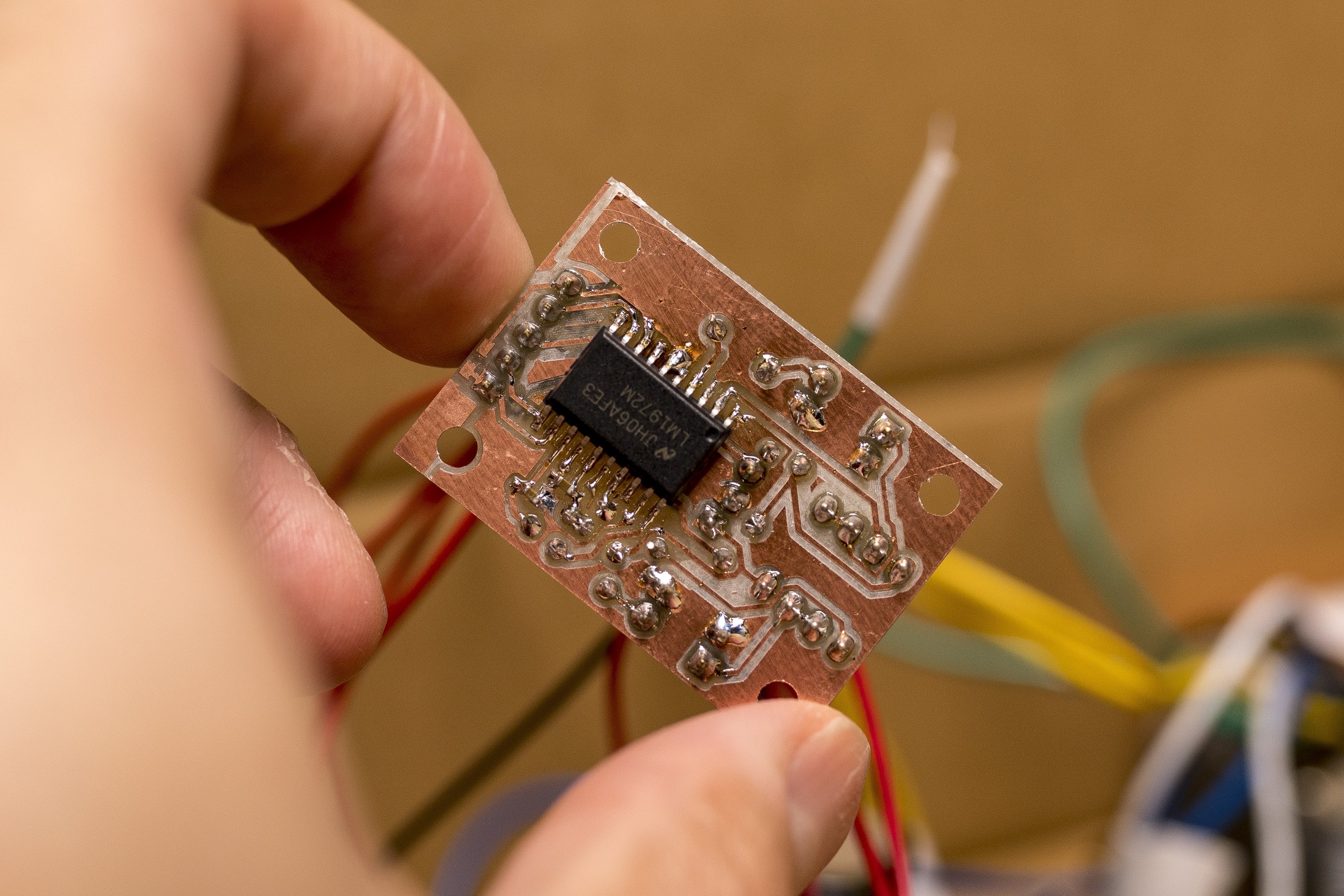
基板
.png)
コード
さくっと書きこんで動かせるので Arduino Nano で実験。
- ADC 0 から値を読んで、0から78dBの間を可変する (ミュートなし)
- ADC 0 にBカーブ可変抵抗器をつける (0〜5V分圧可変)
という前提。以下のようなことに気をつける。
- SPI は MODE 0。ローからはじまって立ちあがりで読む。
- D10 SS を使ってるけど、マスターなので特にこのピンを使う意味はない
- LOAD/SHIFT は1ch書きこむごとにオン/オフすること (16bit 書くごと)
- DATA-OUT をデイジーチェーンして次の DATA-IN に繋げる場合は単に4ch分を連続して書きこむ
volumeToAttenuation() は 0〜1023 の値を 1dB ステップで 0〜78dB の設定値に変換する関数。48dB を境に減衰量が変わるので注意が必要。0.5dB ステップは使ってない。
#include <Arduino.h>
#include <SPI.h>
void setAttenuation(const uint8_t v) {
// channel selection
// 0x00 (channel 1) / 0x01 (channel 2)
// attenuation setting
// 0b00000000 (0) 0.0dB
// 0b00000001 (1) 0.5dB
// 0b00000010 (2) 1.0dB
// ...
// 0b01100000 (96) 48.0dB
// 0b01100001 (97) 49.0dB
// 0b01100010 (98) 50.0dB
// ...
// 0b01111110 (126) 78.0dB
// 0b01111111 (127) 100.0dB (Mute)
// 0b10000000 (128) 100.0dB (Mute)
// ...
// 0b11111111 (255) 100.0dB (Mute)
//
// initial state is Mute
digitalWrite(SS, LOW);
delay(1);
SPI.transfer(0x00);
SPI.transfer(v);
delay(1);
digitalWrite(SS, HIGH);
delay(1);
digitalWrite(SS, LOW);
delay(1);
SPI.transfer(0x01);
SPI.transfer(v);
delay(1);
digitalWrite(SS, HIGH);
}
uint8_t volumeToAttenuation(uint16_t v) {
// volume 0% -> 78dB (126)
// volume 100% -> 0dB (0)
uint8_t dB = ((uint32_t)(1023 - v) * 78 / 1023);
uint8_t att = 0;
if (dB < 48) {
att = 2 * dB;
} else {
att = 96 + dB - 48;
}
return att;
}
void setup() {
Serial.begin(9600);
Serial.println("setup");
// LM1972 Pin / Arduino Pin
// (9) CLOCK <-> (D13) SCL
// (10) LOAD/SHIFT <-> (D10) SS
// (11) DATA-IN <-> (D11) MOSI
pinMode(SS, OUTPUT);
digitalWrite(SS, HIGH);
SPI.setBitOrder(MSBFIRST);
SPI.setClockDivider(SPI_CLOCK_DIV16);
SPI.setDataMode(SPI_MODE0);
SPI.begin();
}
uint8_t prevLevel = 255;
void loop() {
uint16_t val = analogRead(0);
uint8_t att = volumeToAttenuation(val);
if (abs(att - prevLevel) > 1) {
Serial.print("analogRead = ");
Serial.print(val);
Serial.print(" att = ");
Serial.println(att);
prevLevel = att;
setAttenuation(att);
}
} 備考
最初うっかり±15V、つまりVSS=-15V, VDD=15V をかけてしまい、燃やしてしまった (煙が出て、はんだが溶けてチップが脱落した)。LM1972 は絶対最大定格がVDD-VSS=15V、Typical 12V なので、定格の倍以上の電圧をかけていたことになる。あたりまえだけど定格は確認しないといけない。設計段階で回路図を書く前に気付くべきな、あまりにもしょうもないミス。自戒のためアホなことをしたことも書いておく。
運用上でのよくない点も災いした。
いつもは電源をはじめていれるときは安定化電源を電流制限 (CC) をかけつつオンにし、電流量を見るのだが、今回は正負電源を用意する必要があったため、初回から直接手元にあったトランス経由の電源回路へ繋いでしまった。おかげで異常に電流が流れていることに気付きにくかった。
ということで、正負電源を用意しやすくし、事故を減らすために電源を1台増やす予定。
結局 ±5V で試した。当然うまくいった。