
✖
![]()
![]()
![]()

![]()
![]()
![]()
https://github.com/GoogleChromeLabs/comlink
「Comlink makes WebWorkers enjoyable.」と書いてあるが、キモは postMessage の抽象化なので、iframe 間通信にも使用することができる。ただ、origin の取り扱いをする必要があるので、ラッパーが必要。といってもラッパーも Comlink.windowEndpoint() という形で Comlink 自身に用意されている。
iframe の親でも小でも、どちらでも Comlink.expose することができる (役割は反転できる)。ただ、その際に該当する window インスタンスが必要なので、iframe の親側では小フレームのロードを待たなければならない。
![]()
![]()
![]()
Cordova は file: で実行される。Capacitor は http: (Android) で実行される。
この違いは案外大きい。ESM (type="module" などでロードされる ECMAScript Modules) は application/javascript でなければ実行されないという厳格なルールがあるが、file:// ではすべてのファイルに mime-type が設定されないため、実行できない。回避する方法は結局のところ localhost にサーバを立てるぐらいしかない。この点だけでももう Cordova は厳しい。
Cordova はビルド時に必要なソースコードを生成する。このため実際のビルドは必ず cordova コマンドを介す。
Capacitor はソースコードのスキャフォルドを最初に生成する。レポジトリには各プラットフォームの完全なプロジェクトが生成される。このため、実際のビルドは Android Studio や Xcode など、ネイティブな環境で行われる。
![]()
![]()
![]()
![]()
![]()
![]()
Android Debug Bridge (adb) | Android Developers に従うだけ。
一旦 USB で接続して、デバイス側の adb を tcpip 経由に変更する
adb tcpip 5555
USB 接続を外して、adb connect [device ip address] を実行する
adb connect device_ip_address
細かい手順は公式の説明にちゃんと書いてある。これで手元の端末 (Huawei P20) ではうまくいった。
これで adb は WiFi 経由でデバイスを認識しているので、adb install なども WiFi 経由で可能になる。
上記手順を踏んでいれば chrome://inspect を開くと該当デバイスの Chrome インスタンスも見えているはず。そのままデバッグできる。
Android をホストとして USB デバイスを接続していると、USB ポートは必ず埋まってしまう。もし USB で adb 接続しようと思うと大変煩雑になる
デバイス側のセキュリティ要件なのかわからないが、しばらく経過すると、勝手に USB デバッグのチェックが外れたりする。よくわかってない。
とりあえず wakelock をとったほうがいいのかも
![]()
![]()
![]()
GitHub Pages を GitHub Actions で PDF 化して releases にアップロードするというのをやってみた。
が基本的なところ。GitHub Pages のデプロイは Actions よりも遥かに早く終わるので、厳密に同期をしていない (Actions で Jekyll を起動して HTML を生成するのが正攻法だけど、この方法はものすごく時間がかかってしまう)。
wkhtmltopdf は openlabs/docker-wkhtmltopdf という Docker イメージを利用した。ただし、このイメージには日本語フォントが入っていないので、ちょっと工夫する必要がある。具体的にはレンダリングしたい HTML 側で、明示的に Google Fonts などから Web Fonts としてロードしてやる必要がある。
ghr は go を入れるところからやってしまったが、たぶん ghr の releases からバイナリ落としてきて展開するほうが早いと思う。そのうち変更するかも。
name: document release
on: [push]
jobs:
build:
runs-on: ubuntu-latest
steps:
- name: Set up Go 1.12
uses: actions/setup-go@v1
with:
version: 1.12
id: go
- name: Convert HTML to PDF
run: |
docker run \
-v ${{ github.workspace }}:/srv/jekyll -v ${{ github.workspace }}/_site:/srv/jekyll/_site \
openlabs/docker-wkhtmltopdf --print-media-type https://cho45.github.io/NanoVNA-manual/ /srv/jekyll/_site/NanoVNA-manual.pdf
- name: Upload to releases
env:
GO111MODULE: on
GOPATH: /home/runner/work/
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
run: |
go get -u github.com/tcnksm/ghr
$GOPATH/bin/ghr -u cho45 -r NanoVNA-manual -recreate -replace -n latest -b "latest" latest ${{ github.workspace }}/_site/NanoVNA-manual.pdf
![]()
![]()
![]()
以下のようなテーブルのとき
CREATE TABLE foo
(
aset set('aaa', 'bbb', 'ccc')
); UPDATE foo SET `aset` = CONCAT_WS(',', NULLIF(aset, ''), #{member}); aset が空文字列(emptyset)のとき、これをそのままカンマで CONCAT_WS すると、",ccc" とかになり、空文字列のメンバーは許容していないため data truncated でエラーになってしまう。
CONCAT_WS は引数が null のときはそれを飛ばして連結するので、それを利用する。
ref. https://stackoverflow.com/questions/14642658/the-best-way-to-remove-value-from-set-field
UPDATE foo SET `aset` = TRIM(BOTH ',' FROM REPLACE(CONCAT(',', aset, ','), CONCAT(',', #{member}, ','), ',')) もっとややこしい。というのも ",aaa" も "aaa,,ccc" も "aaa," も不正なので、こういう値にならないようにしないといけない。
SET は実際は 64bit の数値なので、SET のメンバー名(文字列)を2の乗数の数値に変換する方法があれば、単にビット演算ですむ。けど、MySQL 上にはこの方法 (メンバー名を SET の数値に直接変換する) がない(と思う)。アプリケーション側で数値と文字列のマッピングを持てば SQL は簡単になるが DDL と常に整合性をとる必要があってややこしく、それなら SET じゃなく BIGINT UNSIGNED で持てばいいことになる。
なんかいい方法あったら教えてください (SET 使うな以外で)
![]()
![]()
![]()
![]()
![]()
![]()
ある程度きちんと網羅されたのがなかったので自分で書いていた。コード読みながら書いてるので、誤解がなければ正しいことが書いてあるはず。とはいえ完全に網羅できてない (electrical delay まわりとかの記述がまるっと抜けている)。
![]()
![]()
![]()
![ソニー 広角単焦点レンズ フルサイズ FE 28mm F2 デジタル一眼カメラα[Eマウント]用 純正レンズ SEL28F20 - ソニー(SONY)](https://m.media-amazon.com/images/I/41-tLipGfPL._SL500_.jpg)
ソニー 広角単焦点レンズ フルサイズ FE 28mm F2 デジタル一眼カメラα[Eマウント]用 純正レンズ SEL28F20 cho45
ソニー FE マウントは 55mm しか持っていなかったが、28mm もついに買ってしまった。FE マウントでは安い部類なのでさっさと買えばよかった。
![]()
![]()
![]()
![]()
![]()
![]()
memcached のデータが早々に消えることが多くなっていて困っていた。
https://lowreal.net/2016/12/14/2 で h2o の ssl-session-resumption のストア先を memcached にしているのが原因ではないか?と思ってやめてみたらなおった気がする。
![]()
![]()
![]()
NanoVNA (stm32f07) に対しての書きこみで、どの方法が早いのだろうか?と気になったので試した。対象は 95764bytes の ch.bin
結論からいうと SWD 経由の書きこみが早い。
(前もって DFU モードでブートする必要あり)
$ time dfu-util -d 0483:df11 -a 0 -s 0x08000000:leave -D build/ch.bin dfu-util 0.9 Copyright 2005-2009 Weston Schmidt, Harald Welte and OpenMoko Inc. Copyright 2010-2016 Tormod Volden and Stefan Schmidt This program is Free Software and has ABSOLUTELY NO WARRANTY Please report bugs to http://sourceforge.net/p/dfu-util/tickets/ dfu-util: Invalid DFU suffix signature dfu-util: A valid DFU suffix will be required in a future dfu-util release!!! Opening DFU capable USB device... ID 0483:df11 Run-time device DFU version 011a Claiming USB DFU Interface... Setting Alternate Setting #0 ... Determining device status: state = dfuERROR, status = 10 dfuERROR, clearing status Determining device status: state = dfuIDLE, status = 0 dfuIDLE, continuing DFU mode device DFU version 011a Device returned transfer size 2048 DfuSe interface name: "Internal Flash " Downloading to address = 0x08000000, size = 95764 Download [=========================] 100% 95764 bytes Download done. File downloaded successfully Transitioning to dfuMANIFEST state dfu-util -d 0483:df11 -a 0 -s 0x08000000:leave -D build/ch.bin 0.02s user 0.06s system 0% cpu 18.737 total
OpenOCD からデバッグではなくプログラムを書きこむ場合
http://openocd.org/doc/html/Flash-Programming.html#Flash-Programming これの通りだけど、基本的に program コマンドを使えばよい。
program の実装は https://github.com/ntfreak/openocd/blob/master/src/flash/startup.tcl で、いくつかのコマンドを呼びだすラッパーになっている。
stm32f0x だと stm32f0x.cfg で reset 直後に 48MHz クロックを起動して JTAG の最高速度を 8MHz まで上げている。

USB 経由と違って、いきなりコマンドを実行すれば書きこめる。
$ time openocd -f interface/stlink.cfg -f target/stm32f0x.cfg -c "program ./build/ch.bin 0x08000000 verify reset exit"
Open On-Chip Debugger 0.10.0+dev-00930-g09eb941c (2019-09-14-00:35)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Info : auto-selecting first available session transport "hla_swd". To override use 'transport select <transport>'.
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
Info : clock speed 1000 kHz
Info : STLINK V2J34S7 (API v2) VID:PID 0483:3748
Info : Target voltage: 3.261130
Info : stm32f0x.cpu: hardware has 4 breakpoints, 2 watchpoints
Info : Listening on port 3333 for gdb connections
Info : Unable to match requested speed 1000 kHz, using 950 kHz
Info : Unable to match requested speed 1000 kHz, using 950 kHz
target halted due to debug-request, current mode: Thread
xPSR: 0xc1000000 pc: 0x080000c0 msp: 0x20000200
Info : Unable to match requested speed 8000 kHz, using 4000 kHz
Info : Unable to match requested speed 8000 kHz, using 4000 kHz
** Programming Started **
Info : device id = 0x20016448
Info : flash size = 128kbytes
** Programming Finished **
** Verify Started **
** Verified OK **
** Resetting Target **
Info : Unable to match requested speed 1000 kHz, using 950 kHz
Info : Unable to match requested speed 1000 kHz, using 950 kHz
shutdown command invoked
openocd -f interface/stlink.cfg -f target/stm32f0x.cfg -c 0.37s user 0.83s system 27% cpu 4.365 total 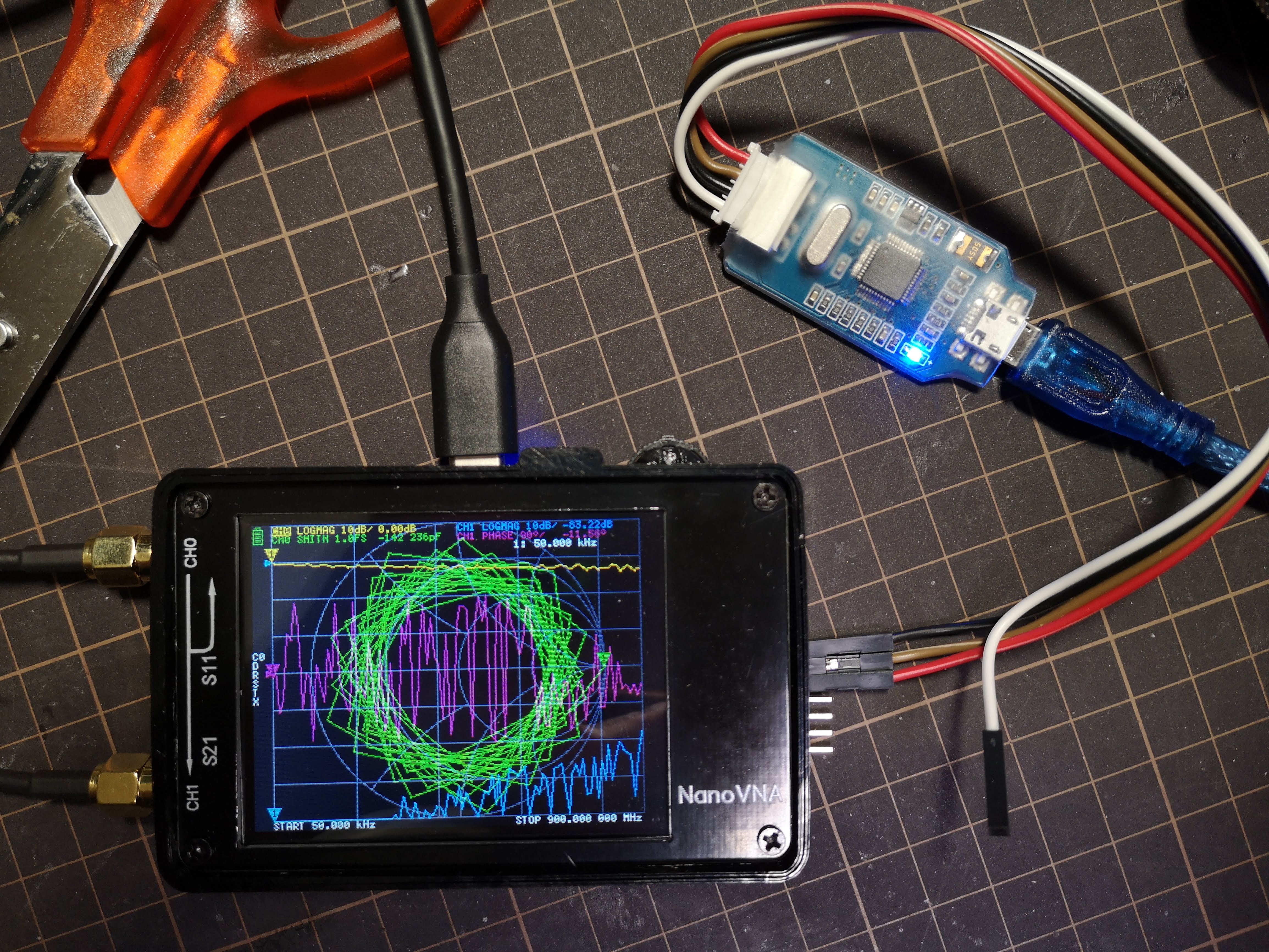
nRF51 で一回試したっきり使っていない怪しい J-Link OB
USB 経由と違って、いきなりコマンドを実行すれば書きこめる。デフォルト JTAG なので、ちゃんと SWD を指定しないとダメです。
$ time openocd -f interface/jlink.cfg -c "transport select swd" -f target/stm32f0x.cfg -c "program ./build/ch.bin 0x08000000 verify reset exit"
Open On-Chip Debugger 0.10.0+dev-00930-g09eb941c (2019-09-14-00:35)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
swd
Info : J-Link ARM-OB STM32 compiled Aug 22 2012 19:52:04
Info : Hardware version: 7.00
Info : VTarget = 3.300 V
Info : clock speed 1000 kHz
Info : SWD DPIDR 0x0bb11477
Info : stm32f0x.cpu: hardware has 4 breakpoints, 2 watchpoints
Info : stm32f0x.cpu: external reset detected
Info : Listening on port 3333 for gdb connections
target halted due to debug-request, current mode: Thread
xPSR: 0xc1000000 pc: 0x080000c0 msp: 0x20000200
** Programming Started **
Info : device id = 0x20016448
Info : flash size = 128kbytes
** Programming Finished **
** Verify Started **
** Verified OK **
** Resetting Target **
shutdown command invoked
openocd -f interface/jlink.cfg -c "transport select swd" -f -c 0.25s user 0.52s system 16% cpu 4.628 total
![]()
![]()
![]()
chromium Issue 884928: Web Serial API が該当する。(Chrome 系以外では実装されていない。予定もない)
実は Chrome Stable 77 でも、既に chrome://flags/#enable-experimental-web-platform-features を有効にしていると navigator.serial が生えてくるようになっている。
が、Android では(まだ)使えないみたいだ。上記イシューも Android がスコープに入っていない。
簡単に試せるページもある GitHub - GoogleChromeLabs/serial-terminal: Demo application for the Serial API.
ちなみに WebUSB での polyfill があったりする(これも google のレポジトリに入っている…) https://github.com/google/web-serial-polyfill けど、USB CDCはだいたいはOS側でインターフェイスを握られてしまうので、ドライバを無効にしたりしないといけないことに注意がいる。
現行では worker コンテキスト内で使うことができない。API 自体は有効なのだが、requestPort() してペアリングしたシリアルポートを、worker 内の getPorts で取得することができない。Issue 1005079: Serial Mojo interface not provided to Workers 報告したらイシューが立った。
また、上記に関連するのかもしれないが、そこそこ高速で通信を行うと容易にバッファが溢れてしまい、データの欠落が起こる。なので非常に大きなバッファを指定する必要がある。複数同時に read してもダメ。
![]()
![]()
![]()

しばらく放っておいてどうセットアップしたか忘れたので、https://www.armbian.com/nanopi-neo-2/ armbian を改めて入れてみる。
FriendlyARM のイメージも結構更新されていそうだけど、どっちがいいか不明。しかし FriendlyARM のイメージはいまいちデキが良い感じがしなかったので、armbian Bionic server (Ubuntu系) を入れてみる。
Etcher で焼くだけ
ping 192.168.0.255 とかして arp -a して 02:01:a9 からはじまる Mac アドレスがそれ。
https://docs.armbian.com によると、デフォルトで ssh が起動しており、root 、 1234 で入れるらしい。
ssh root@192.168.0.xx
すると、初回設定としてパスワード変更とユーザ追加をさせられる。やったら一回 logout して、作ったユーザーでログインしなおす。
前後して
ssh-copy-id cho45@192.168.0.17
とかやっておく。
sudo armbian-config
して Personal -> Timezone の設定と、 System -> Hardware -> i2c0 にチェックを入れて再起動。
検出できるか確認しとく。
$ sudo apt install i2c-tools
$ sudo i2cdetect -y 0
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- 3c -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- -- i2c グループに自分を追加しておく
$ sudo usermod -a -G i2c # 一回ログアウトすること $ i2cdetect -y 0
armbian もデフォルトでは root にしか gpio へのアクセス権限がなく、gpio グループなども設定されていない。ので自分でやる必要がある.
sudo groupadd gpio sudo usermod -aG gpio cho45
$ sudo vim /etc/udev/rules.d/80-gpio.rules SUBSYSTEM=="gpio", PROGRAM="/bin/sh -c '/bin/chown -R root:gpio /sys/devices/platform/soc/*pinctrl/gpio*'" SUBSYSTEM=="gpio", PROGRAM="/bin/sh -c '/bin/chmod -R ug+rw /sys/devices/platform/soc/*pinctrl/gpio*'" SUBSYSTEM=="gpio", PROGRAM="/bin/sh -c '/bin/chown -R root:gpio /sys/class/gpio'" SUBSYSTEM=="gpio", PROGRAM="/bin/sh -c '/bin/chmod -R ug+rw /sys/class/gpio'"
sudo udevadm control --reload-rules sudo udevadm test --action=change /sys/devices/platform/soc/1c20800.pinctrl/gpiochip1/gpio/gpio0
$ ls -altr /sys/class/gpio/ total 0 -rw-rw---- 1 root gpio 4096 Sep 15 15:45 export drwxrwxr-x 2 root gpio 0 Sep 15 15:45 . drwxr-xr-x 51 root root 0 Sep 15 15:45 .. lrwxrwxrwx 1 root gpio 0 Sep 15 15:45 gpio0 -> ../../devices/platform/soc/1c20800.pinctrl/gpiochip1/gpio/gpio0 -rw-rw---- 1 root gpio 4096 Sep 15 15:45 unexport lrwxrwxrwx 1 root gpio 0 Sep 15 15:45 gpio3 -> ../../devices/platform/soc/1c20800.pinctrl/gpiochip1/gpio/gpio3 lrwxrwxrwx 1 root gpio 0 Sep 15 15:45 gpiochip352 -> ../../devices/platform/soc/1f02c00.pinctrl/gpio/gpiochip352 lrwxrwxrwx 1 root gpio 0 Sep 15 15:45 gpiochip0 -> ../../devices/platform/soc/1c20800.pinctrl/gpio/gpiochip0 lrwxrwxrwx 1 root gpio 0 Sep 15 15:45 gpio2 -> ../../devices/platform/soc/1c20800.pinctrl/gpiochip1/gpio/gpio2
nodejs をいれる。apt でいれると気持ちわるいことになるので公式パッケージをいれるほうがよい。
$ cd ~/ $ mkdir app $ cd app $ wget https://nodejs.org/dist/v10.16.3/node-v10.16.3-linux-arm64.tar.xz $ tar xvf node-v10.16.3-linux-arm64.tar.xz $ ln -s node-v10.16.3-linux-arm64 node $ cd ~/bin $ ln -s ~/node/bin/* .
$ sudo apt install pkg-config libcairo2-dev $ git clone git@github.com:cho45/nanohat-oled-nodejs.git $ cd nanohat-oled-nodejs $ npm install
動作確認
$ node index.js
systemd 化
$ ./install.sh
$ ls /etc/update-motd.d
にある。/etc/update-motd.d/30-armbian-sysinfo が特に有用
![]()
![]()
![]()






