OCXO の VFC ピンでの可変範囲を GPS の 1PPS を使って調べた
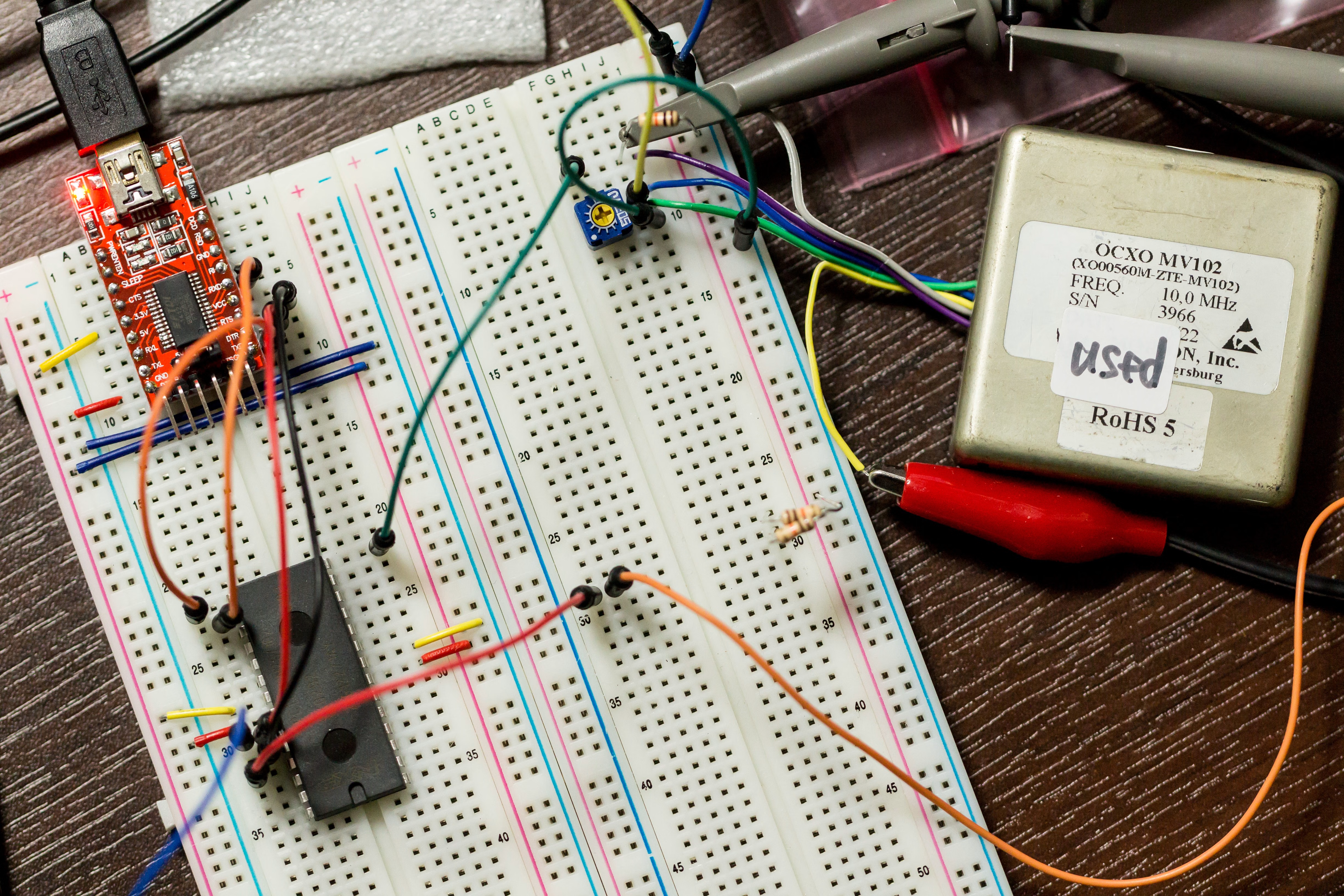
ebay で注文した OCXO が届いたのでテストしてみました。このぐらいの小さな OCXO です。
MORION MV102 10MHz +12V OCXO
出力は HCMOS 矩形波 (10kΩ 39pF 負荷) となっています。正弦波出力が欲しかったのですが間違えて買ってしまいました。バッファしてフィルタすればいい気はします。とりあえずデジタル回路に直結でき、軽くテストするには便利なのでこれはこれで良いことにします。
GND Us RF Uref Uin
というピンアサインになっています。Us は +12V入力、RF は出力、Uref はリファレンス電圧(5V)、Uin はVCOの入力のようです。
Uin には 0〜5V で入力し、これにより±4e-7 (±4Hz) 調整できるというスペックです。
とりあえず 12V 加えるだけで 10MHz の出力が得られます。約 200mA ぐらい (2.5W程度) の消費電力があります。2時間ぐらい通電してみましたが特に下がりませんでした。クソ寒い部屋でやっているせいかもしれませんが…
OCXO なので結構熱くなります。しばらく触っていられるぐらいなので45〜55℃ぐらいでしょうか…
GPS の 1PPS で周波数カウントしてみる
GPSモジュールはこの前試した NEO-6Mです。3pin から線を別途引き出して使っています。窓際でやっているので、あまり安定した受信とはいえませんが、3D Fix したタイミングで計ってみました。
MPU として LPC1114FN28 を使って、以下のようなコードを書きました。ハードウェアカウンタは mbed の API からは使えるようになっていないので、データシートを読む必要があります。
本当は、ハードウェアでカウントしつつ、1PPS シグナルのキャプチャ信号でカウンタをキャプチャレジスタに自動的に入れて、同時に割込みを発生させてその値を読み出すみたいにしたかったのですが、少なくとも LPC1114 においてはそういうことはできないようでした (2つ以上のキャプチャピンを持っていない・外部入力カウンタとして使う場合、キャプチャレジスタを使用することはできない)
なので、実際のコードでは 32bit のカウンタを外部入力(10MHz)でフリーランカウントさせ、GPS の1PPSのタイミングでカウンタの値を読みこんで、前回との差分をとって周波数を求めています。
1PPS ごとの表示なので、簡単なコードですが、GPS同期の正確なゲート時間1秒周波数カウンタとして動いています。
#include "mbed.h"
#include <stdint.h>
constexpr uint32_t CLOCK = 10000000;
constexpr uint16_t HISTORY = 1000;
int16_t errors[HISTORY];
uint16_t error_index = 0;
uint16_t error_count = 0;
volatile bool updated = 0;
Serial serial(USBTX, USBRX);
InterruptIn gps1pps(dp25);
int main() {
// enable 32bit counter
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<9/*CT32B0 32bit counter clock*/);
// Capture pin dp14
LPC_IOCON->PIO1_5 |= (0b010<<0/*FUNC=CT32B0_CAP0*/);
// Match output (not used)
// LPC_IOCON->PIO1_6 |= (0b010<<0/*FUNC=CT32B0_MAT0*/);
// LPC_IOCON->PIO1_7 |= (0b010<<0/*FUNC=CT32B0_MAT1*/);
// LPC_IOCON->PIO0_1 |= (0b010<<0/*FUNC=CT32B0_MAT2*/);
// LPC_IOCON->R_PIO0_11 |= (0b011<<0/*FUNC=CT32B0_MAT3*/);
LPC_TMR32B0->PR = 0;
LPC_TMR32B0->CCR = 0;
LPC_TMR32B0->CTCR =
(0b01<<0/*Counter/Timer Mode=Counter, Rising Edge*/) |
(0b00<<2/*Count Input Select*/);
LPC_TMR32B0->TCR = (1<<0/*Counter Enable*/);
gps1pps.rise([]{
static uint32_t prev = 0;
uint32_t count = LPC_TMR32B0->TC;
uint32_t pps_counter;
if (prev < count) {
pps_counter = count - prev;
} else {
// overflowed
pps_counter = (0xffffff - prev) + count + 1;
}
prev = count;
serial.printf("pps_counter: %lu\n", pps_counter);
int16_t error = static_cast<int32_t>(CLOCK) - static_cast<int32_t>(pps_counter);
error_index = (error_index + 1) % HISTORY;
errors[error_index] = error;
if (error_count < HISTORY) {
error_count++;
}
updated = 1;
});
// NVIC_SetPriority();
serial.baud(115200);
for (;;) {
if (updated) {
updated = 0;
// serial.printf("last: %d\n", errors[error_index]);
//
// uint32_t sum = 0;
// for (int i = 0; i < error_count; i++) {
// sum += errors[ (error_index + HISTORY - i) % HISTORY ];
// }
// uint32_t error = sum * 1000 / error_count;
// serial.printf("sum(%ds): %d\n", error_count, error);
}
}
} 結果
VFC 端子を 0V〜5V まで可変させて周波数を読んでみました。仕様上は の調整範囲 (±4Hz) があると書いてありました。実際やってみると以下のように ±5Hz ぐらいの可変ができるようです。
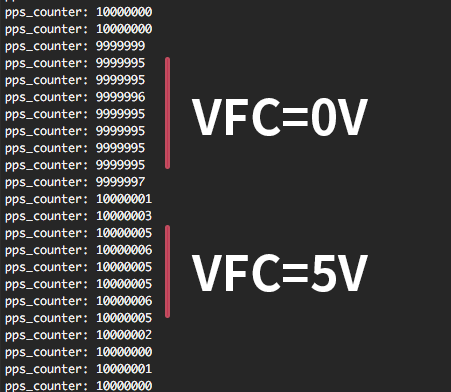
0〜5V の範囲で10Hz可変なので、2 Hz/V、2mHz/mV です。DAC で 1mHz 単位ぐらいで電圧を設定するなら、最低でも14bit程度の精度が必要そうです。
関連エントリー
- OCXO と GPS 1PPS その2 OCXO の VFC ピンでの可変範囲を GPS の 1PPS を使って調べた | tech - 氾濫原 でとりあえず可変範囲ぐらいはわかっ...
- OCXO と GPS 1PPS その3 VFC を PWM によるデジタルコントロールにしてみました。 前回は多回転ボリュームを使って手動で調整をしました。これだと10秒単位ぐらい...
- GPSDO 10MHz 回路と温度安定度 回路と制御方法はだいたい決めたのでそのへんを書いておく VFC をどうコントロールするか OCXO がいくら安定しているといっても、それはV...
- ESP8266 Arduino で CO2 センサー MH-Z19 を読む 寝室に置いてみたいので ESP8266 (ESP-WROOM-02) で動かして GrowthForecast にポストするようにしてみた。...
- 10MHz GPSDO (そのうち書く) OCXO と GPS 1PPS その3 | tech - 氾濫原 というのを3年前に書いてからやる気をうしなって放置してましたが、STM32...