

✖
![]()
![]()
![]()
![]()
![]()
![]()
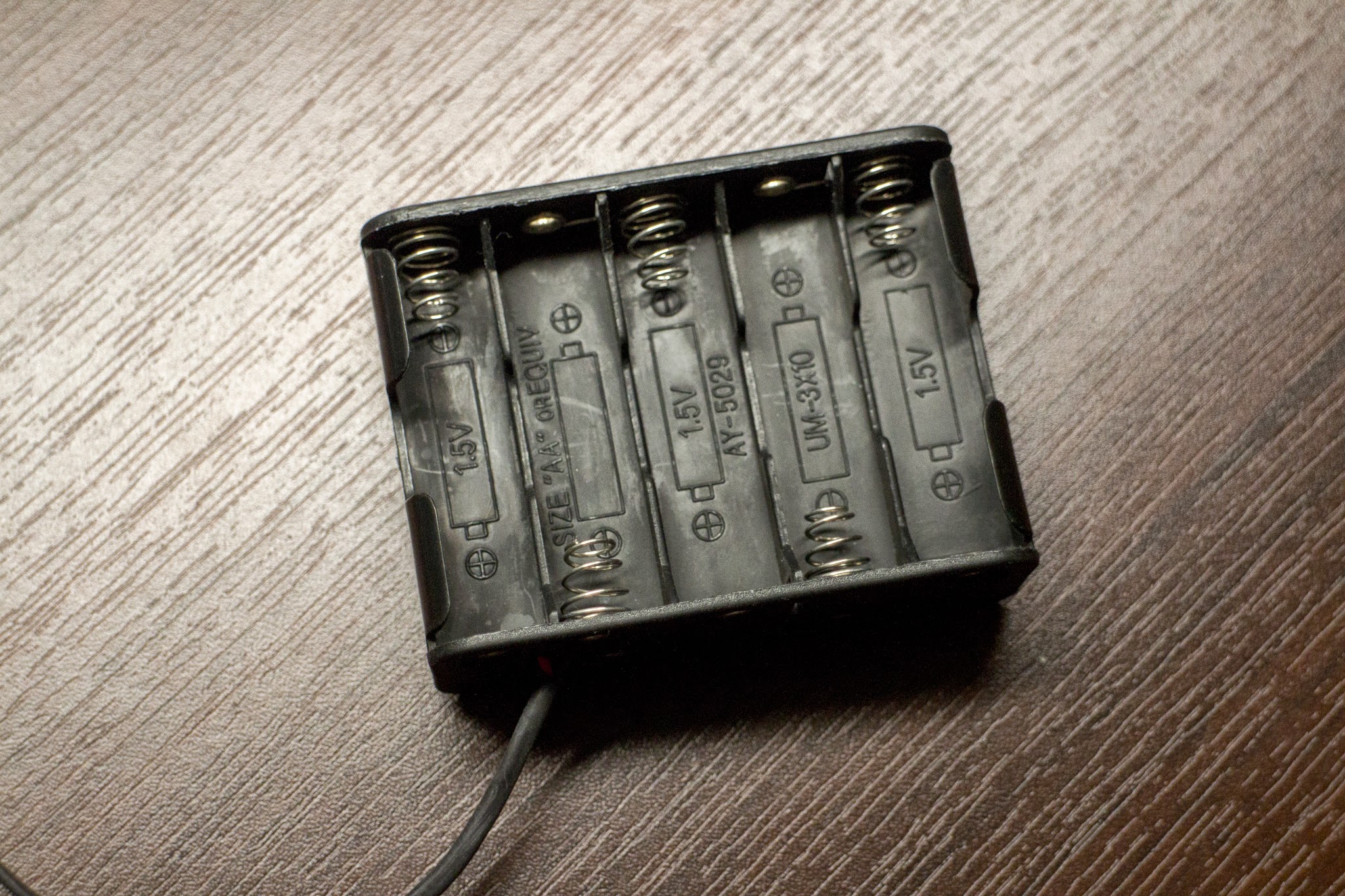
よくある、マイナス側がスプリングになっている電池ケース、直列10個のものを使っていたが、どうも電圧降下が大きい気がしたので計ってみたところ、端子一組あたり67mΩほど抵抗があった。
10個直列で入っているので、およそ合計で 670mΩ の抵抗が直列で入っている。つまり 2A 流すと、これら金具だけで 1.34V も電圧降下が起きてしまう。約 2.68W もの電力がケースだけで失なわれる。
検索したところ、この手の電池ホルダーの性能があまり良くないのは有名らしく、特にスプリングの材質があまりよろしくないようだ。
いろいろ探した結果アメリカ Keystone 社の電池ホルダーがよさそうということがわかったが、廃盤のようで非常に高価になってしまっている。昔は秋月で100円ぐらいで売っていたみたいだけれど、今はもう単4のものしかない。
ということで、代わりにaitendo の電池ホルダで作ってみた。(秋月にも同様の製品はある)
これで作ってみたところ、電池1つあたりの電圧降下は 1A のとき 5mV つまり抵抗値は 5mΩ になった。10本で 50mΩ ということになり、2A時でも 100mV の電圧降下に抑えられ、大きく改善された。
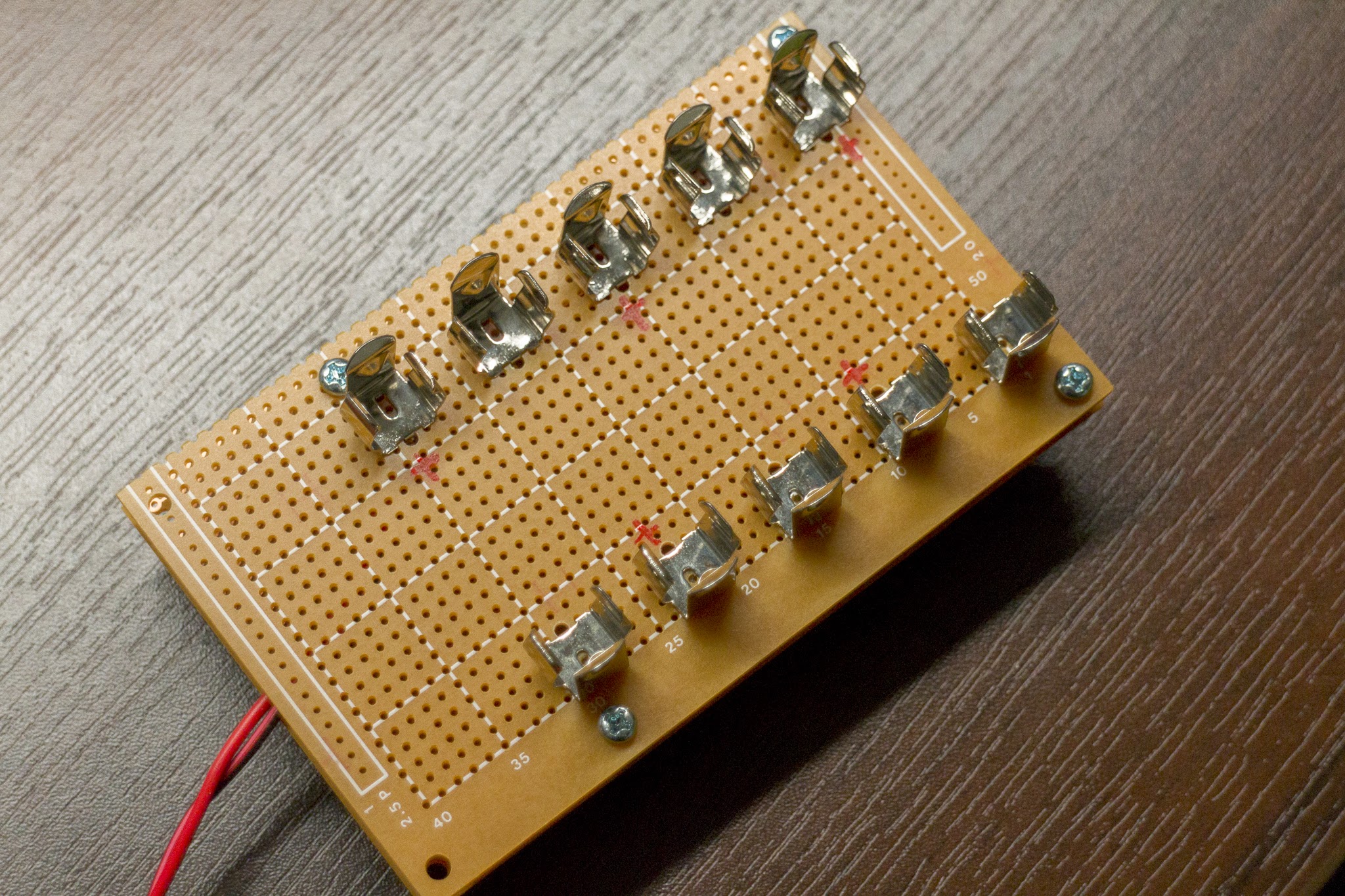
この電池クリップ(ホルダー)は基板にうまく固定する必要があって面倒なのと、プラス/マイナスの入れ間違いをしても気付けない (フェイルセーフがついてない) ので、あまり好ましい感じではない。が、電池ケースでやたら無駄に電力が熱に変わるのは嫌なのでしかたない。
テスターの抵抗測定機能だと微小抵抗はちゃんと測れないので、デジタルマルチメーター2台による4点計測方式で測定した。
電池の金具部分に比較的大きな電流 (経路中の定格を上回らない程度) を流し、測定対象で降下した電圧を計って抵抗値を求める。今回は直読できるように、安定化電源の定電流モードで、丁度1A流れるようにして測定した (1A 流した場合、R = E / I なので、R = E になる)
ただし、電池を入れた状態での測定ではないので、電池の端子との接触抵抗は測れていない。あくまで金具中の抵抗値だけを計っている
![]()
![]()
![]()
![]()
![]()
![]()
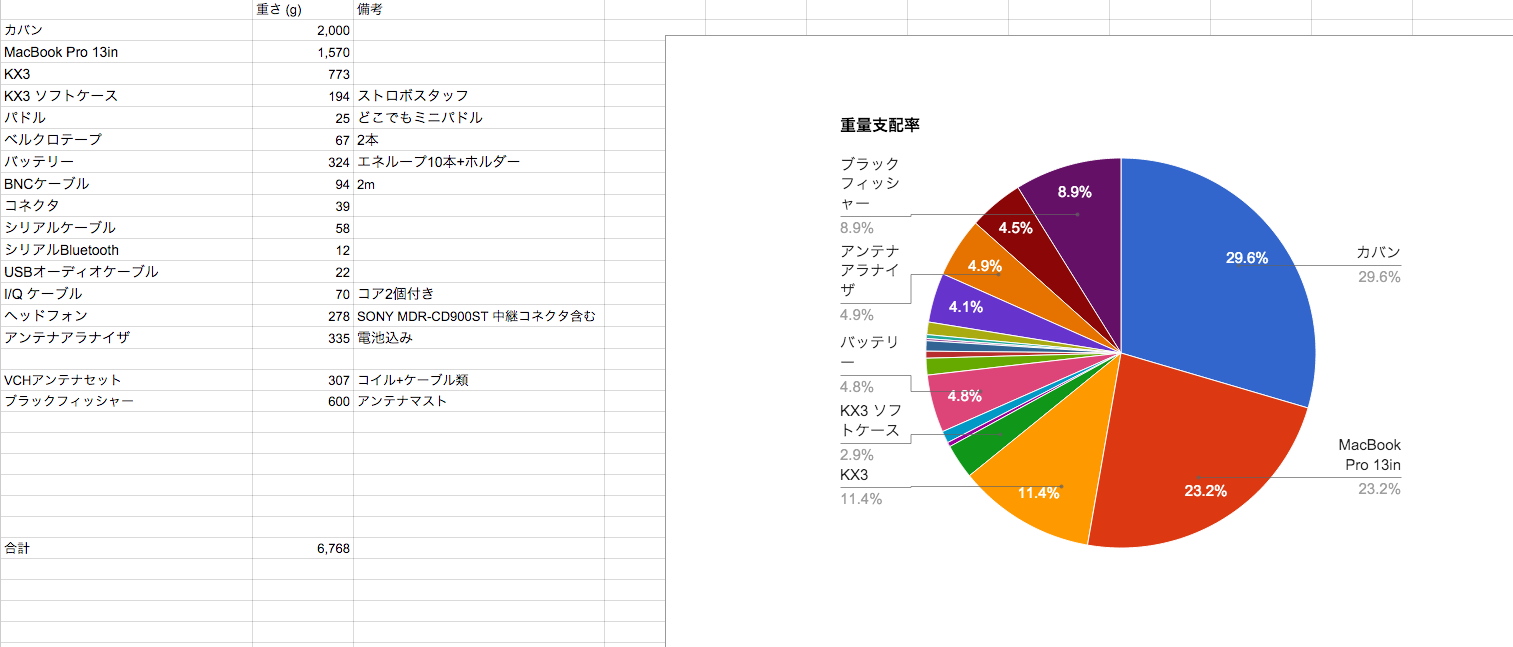
一通り移動運用に必要なものとその重量を表にして重量支配率のグラフを作った。
なので、まずこれらをどうにかする必要がある。カバンはもっと軽いカバンに変えるしかない。MacBook Pro は、昔使っていた Air に新しく無線用のユーザをセットアップしたらちょっとよくなるかもしれない。
カバンを半分の1kg、MacBook Air 11in 1.08kg に変えるとすると、これらだけで 1.6kg 程度軽くすることができる。または、ノートPC自体を止めてスマフォだけでの運用方法を考えたほうがいいかもしれない。
あとは
![]()
![]()
![]()
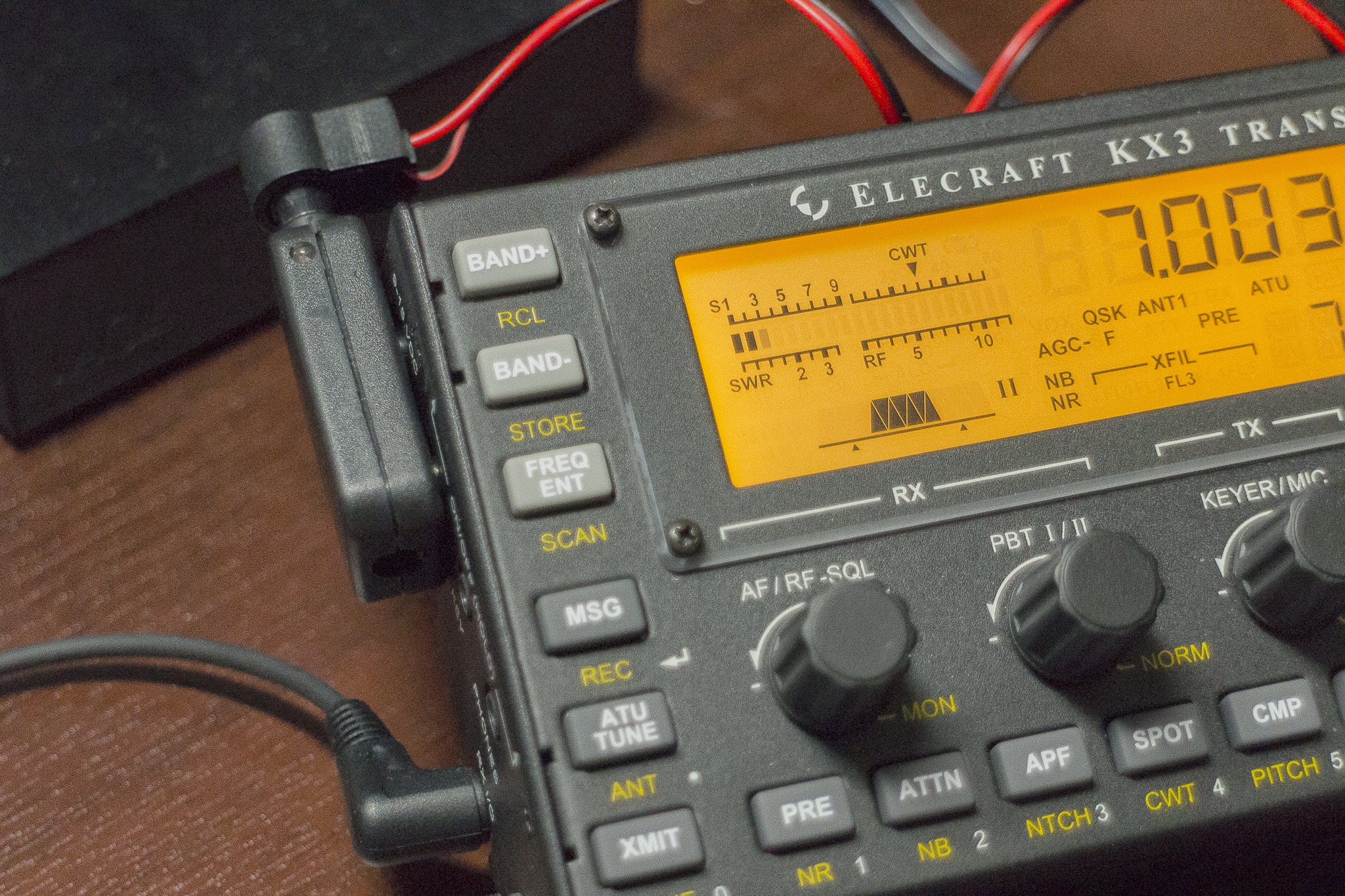
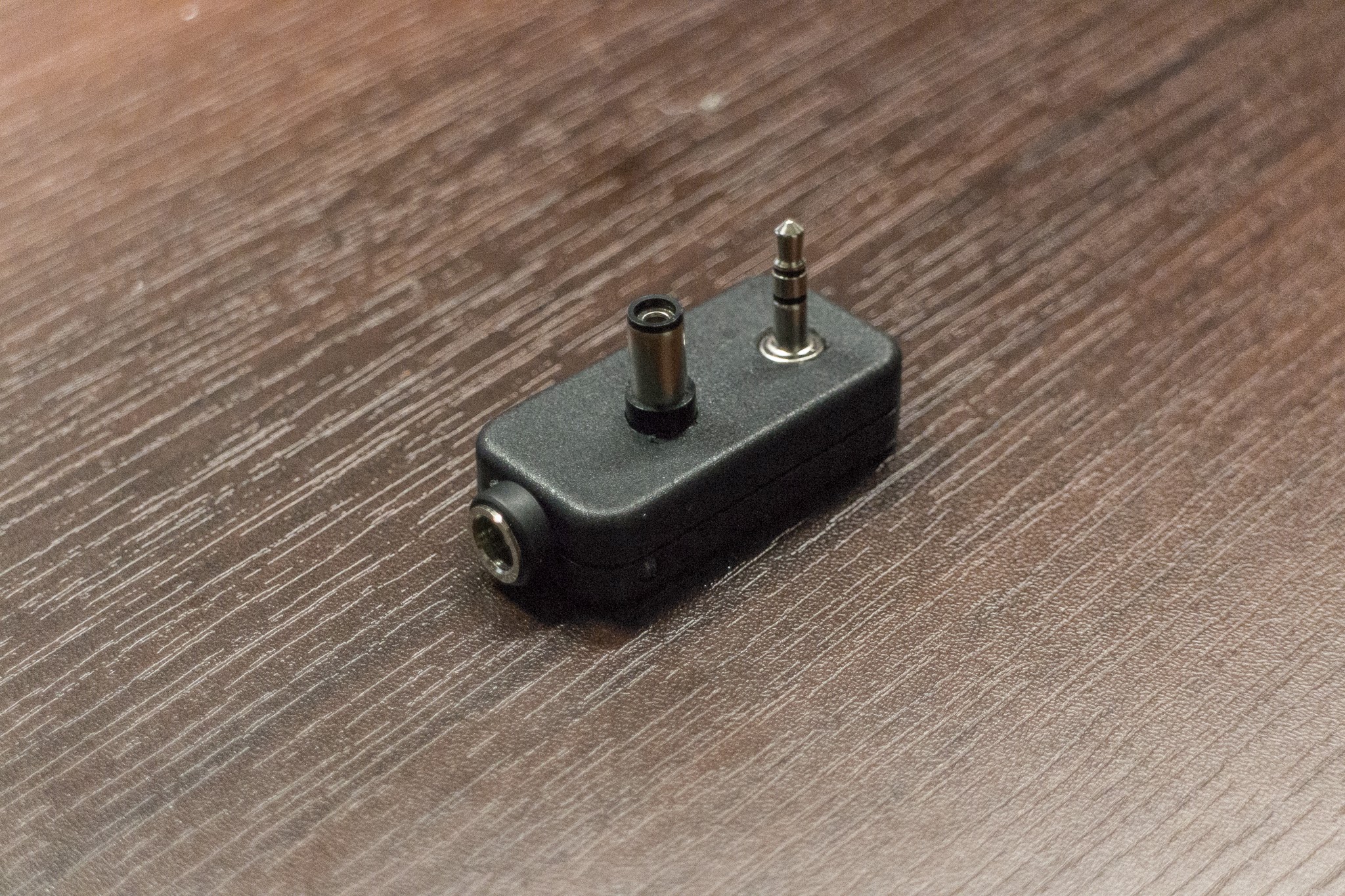
KX3のPC 接続用 ACC1は、RS-232C レベルの電圧レベルを想定している(正確には、0VとVCCの負論理になってるけど)
これをBluetooth化してみたという話。
使ったのは
RN-42 は1500円と、余り安くはないのだけれど、国内技適マークがついており合法的に使える。また、シリアル経由または、接続済みBluetooth経由で内部設定を変更できるモードがあり、簡単に柔軟な設定ができる。
ロジック変換には3.3Vレギュレーター付きのちょうど良いのがあったので、これにしてみた。
実際のところ、負の電圧はいらないので真面目にRS-232C変換する必要はなく、単に電圧と論理変換さえできればいいので、ICを使う必要はないけど、面倒なのでこれにした。
レギュレーターの耐圧が14Vなので、13.8V だとギリギリすぎるのと、ドロップ電圧が大きくて結構発熱してしまう。本当ならKX3内部のスイッチングで降圧された3.3Vに接続できたらいいのだけれど、良い方法がない。40mA 流すと 0.42Wは熱に変わってしまってエコではない。
ただ繋ぐだけなのでデータシート見つつ半田付けしたら普通に動いてくれた。
デフォルトだと115200baudになっているので、screen /dev/tty.xxx 115200 で接続した後に、以下のコマンドで設定しなおす。(38400baudに)
// <CR> は改行 // コマンドモードに入る (GPIO5 が10Hzで点滅するようになる) $$$<CR> // ボーレート設定 SU,38.4<CR> // 設定確認 D<CR> // 再起動 R,1<CR> // コマンドモードを抜ける ---<CR>
(エコーされないので、ローカルエコーを有効にしたほうがわかりやすい。コマンドモードに入ってから + を送るとエコーが有効になる)
これはどうやら電源を切っても記憶されているようなので、最初の一度だけで良い。
最初、ボーレートの設定方法がわからず、GPIO7をプルアップして9600baudに固定してみたが、上記の方法で自由にボーレートを設定できるので、GPIO7は何もしなくてよい。GPIO7 をプルアップした場合、ソフトウェア設定に関わらず強制的に9600baudに固定される。マイコンとか別途繋いだ場合、設定はボーレート強制したほうが安定するとか、そういう用途に使えそう。
GPIO5 は接続が完了すると出力がゼロになるので、LEDを繋いでいても接続中は電流が流れずエコ。ただ、これは対応するデバイスファイルを open しタイミングで消えるので、ペアリングしただけではチカチカしたまま。
デバイスを指定すれば自動的にペアリングされ、/dev/tty.xxx に勝手にデバイスファイルが作られるので、それを指定して普通にシリアル通信すればよく、特に Bluetooth だからといって難しいことはない。
遅延がちょっとあって、ケーブル直と完全に同じ使用感という感じではない。
メリット
デメリット
無線化できるメリットはあるにはあるけど、めっちゃ便利というほどでもない。サイドに繋いでいるケーブル類の殆どの無線化できたら便利だろうけど、難しい。数本繋いでいるうちの1本ケーブル減ったくらいでは嬉しさがあんまりないなという感じ。
電源をスイッチング降圧にしたいが、スイッチングだと
というのが厳しい。0.6W ぐらいならリニアレギュレータで我慢するほうがいいかもしれない。
あと、丁度いい小型のケースを見つけるのが難しい。今回は aitendo のプラケース (22x11x43)を使ってみたが、aitendo は在庫が安定してないので、タカチの SW-30B (20x18x30) か SW-40B (30x20x40) がいいかもしれない。
RS-232C をモジュール基板でやってるのも無駄なので、表面実装の適当な Vth 低い FET でやるようにできるとよさそう。
追記
SQ,16 というコマンドをうちこむとレイテンシが改善されるらしい。やってみたけどちょっとマシになる程度
$$$ SQ,16 // low latency 優先モードになる (スループットが落ちる) SQ,0 でデフォルト GQ // 現在のモード
![]()
![]()
![]()
オリジナルのツェップアンテナはハシゴフィーダーを使うが、なぜハシゴなのかよくわかっていなかった。
要は、エンドフェッドでインピーダンスが高いワイヤーへの給電に、同調型のハシゴフィーダーを使うことで、インピーダンス変換を行うということのようだ。
ハシゴフィーダーを同調型として使うことで、平衡経路であるハシゴフィーダー上からは、位相が反対の定在波が立ち打ち消しあって電波がでないが、インピーダンスは長さによって (伝送路インピーダンスとは異なった) 変化する値になり、ちょうどいい長さに調整することで給電できる。このとき、定在波が立っているのでケーブルの伝送路インピーダンスは直接関係なくなる。
同軸の場合、不平衡経路なので、経路上から電波が出てしまい意図した挙動にならない。
ツェップライクと呼ばれるアンテナでは給電にLC共振回路を使って間接的にエレメントに給電している。ハシゴフィーダーの変わりに集中定数で解決している。
ハシゴフィーダーのメリット
デメリット
![]()
![]()
![]()
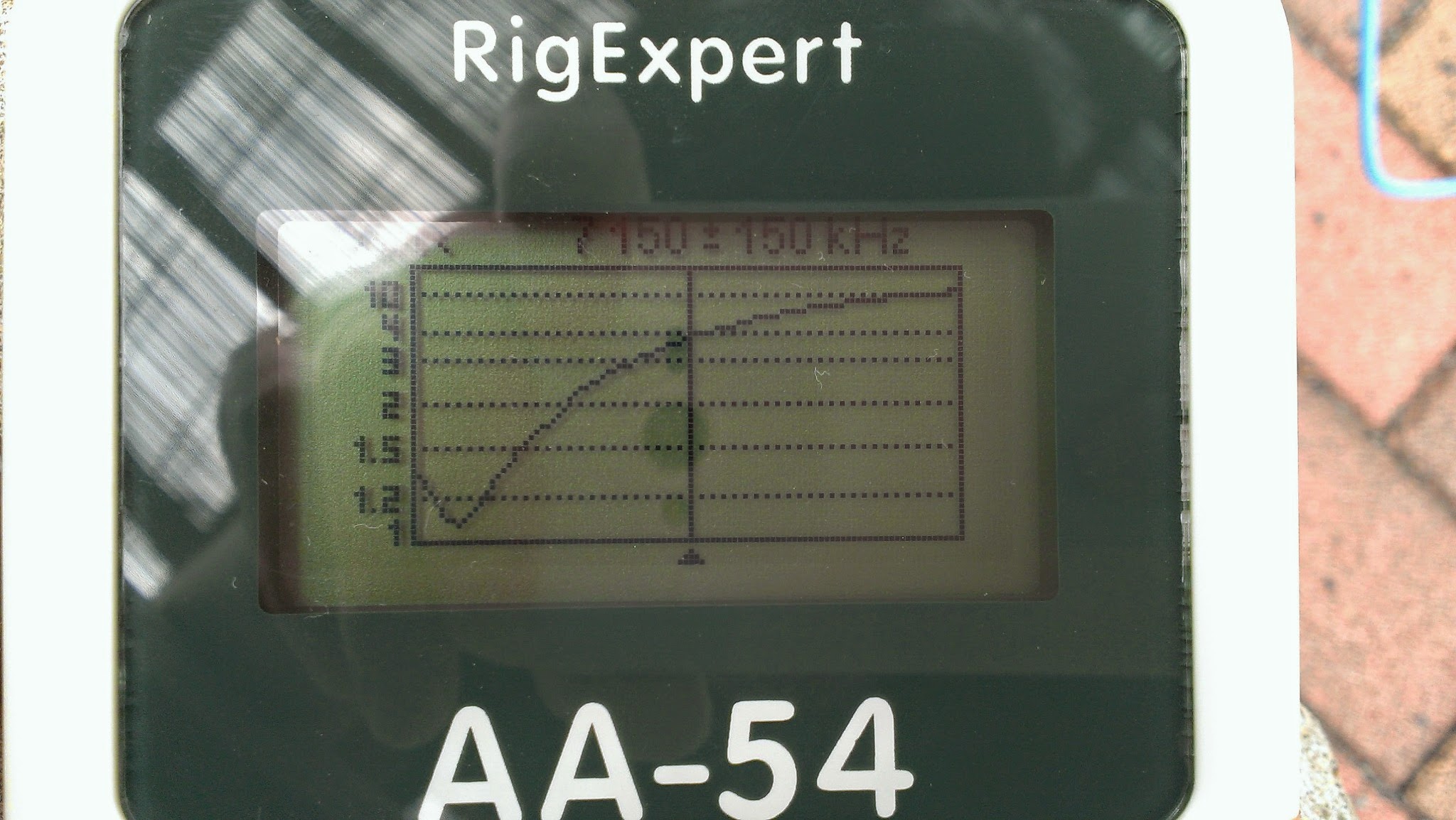
重要なこと: SWR が下がっていれば同調していると考えていいが、SWRが高いからといって同調していないというわけではない。
というのも、リアクタンス成分がゼロ (=共振) でも抵抗成分がミスマッチだとSWRは高くなるから。
正しいアンテナの調整方法は
アンテナが共振状態であれば、あとはマッチングすれば電波は飛ぶ。SWR 計だけだとインピーダンスがどうなっているのかわからないので、詳しく見るにはアンテナアナライザーが必要。
SWR の最小値が見つかるならば、そこは同調点と考えていい。その場合、最低点におけるSWRの高さはインピーダンスの抵抗成分のミスマッチによるものになるので、確かに同調しているならばATUで最後だけあわせこんでも問題ない (はず)
![]()
![]()
![]()
午後は予定があるので午前中だけ
加茂別別雷神社 pic.twitter.com/DmzK8THKiW
— 箱 (@cho45) September 20, 2014川尾神社 pic.twitter.com/CDeVBTR6oR
— 箱 (@cho45) September 20, 2014二葉姫稲荷神社 pic.twitter.com/oUUsF9K3LA
— 箱 (@cho45) September 20, 2014大田神社 pic.twitter.com/Lw4wGvJiHP
— 箱 (@cho45) September 20, 2014今宮神社 pic.twitter.com/tsg7lGjoDP
— 箱 (@cho45) September 20, 2014今宮神社内の月読神社 pic.twitter.com/rk1QMHkU0D
— 箱 (@cho45) September 20, 2014賀茂御祖神社 pic.twitter.com/0BZmAv2NcK
— 箱 (@cho45) September 20, 2014河合神社 pic.twitter.com/pEfo2ilXEI
— 箱 (@cho45) September 20, 2014河合神社内の貴船神社 今回は貴船行かないので… pic.twitter.com/7mgmBndGvO
— 箱 (@cho45) September 20, 2014梨木神社なんか建造中なんだけど、なくなるの pic.twitter.com/B3dp3kgxmO
— 箱 (@cho45) September 20, 2014京都御所 pic.twitter.com/UEpaRgaHLT
— 箱 (@cho45) September 20, 2014白雲神社 pic.twitter.com/yM9qytwjba
— 箱 (@cho45) September 20, 2014厳島神社 pic.twitter.com/JF8H1gqGR4
— 箱 (@cho45) September 20, 2014宗像神社 pic.twitter.com/LfXUPOlsmO
— 箱 (@cho45) September 20, 2014菅原院天満宮 pic.twitter.com/AkCZLpUCG8
— 箱 (@cho45) September 20, 2014下御霊神社 pic.twitter.com/2qgeIHKyT6
— 箱 (@cho45) September 20, 2014疲れてしまったのでちょっと回っただけ
松尾大社 pic.twitter.com/NIe1sf3zfJ
— 箱 (@cho45) September 20, 2014月読神社 pic.twitter.com/KpRskCxb6p
— 箱 (@cho45) September 20, 2014野々宮神社 pic.twitter.com/7SQg9DlwOi
— 箱 (@cho45) September 20, 2014木嶋坐天照御魂神社 (蚕ノ社) pic.twitter.com/mzWhsEViYB
— 箱 (@cho45) September 21, 2014元糺の森 三柱鳥居があるところ pic.twitter.com/xCPhvzztXZ
— 箱 (@cho45) September 21, 2014伏見稲荷大社 pic.twitter.com/nMeU94HPCu
— 箱 (@cho45) September 21, 2014ツイートしたぶんで20社ぐらい。
公共交通機関オンリーだといろいろ厳しい。自転車借りたほうがたくさんまわれるだろう (今回ずっとスーツ着っぱなしだったのでそれはそれで厳しいんだけど)
伏見稲荷大社は昼ごろに行ったけど人が多すぎて微妙だった。早朝にいくのがベストっぽい。
普通に疲れる。
![]()
![]()
![]()
今カメラバッグとしてはZKIN の Yetiを使っていて、結構使ってるけど、これは以下の点で良い
今まで使ってきたカバンだと断トツに良い。
ただこのカバンで致命的なのは、とにかく重いことだ。単体で 2kg あるので、カメラ・レンズ・MacBook・その他を入れると余裕で 6kg ぐらいになる。見た目カジュアルっぽいが、めっちゃヘビーで辛い。
ので、もっと軽くてほぼ同じ使い勝手で安くてデザインが良いのを探しています。
![]()
![]()
![]()
不明なエラー 5002
現象:
ググってでてくる情報でなかなか解決しなかったが以下をやったらなおった。
ローカルにキャッシュされているアカウント情報とサーバ側のアカウント情報に齟齬が起こると変なエラーがでる? よくわからないけど、エラーメッセージに何の意味もなくて途方に暮れる。Console.app にもエラー詳細など一切出ない。
![]()
![]()
![]()
初めて移動運用してみたのでその記録

VCH アンテナと呼ばれるものを作った。全体でλ/2のオフセンター給電のアンテナで、コイルで短縮したり、グラウンドにエレメントを置くことでインピーダンス調整するというもののようだ。
ほぼ設計通りに作った。コイルは100均で買ってきた小さめのシャンプー用ボトルがφ65mmで材質がPETだったのでこれにした。巻いたコイルは 1.5mm アルミ線を自在ブッシュに (2.5mm 間隔) 31T ほど。約 34μH にするらしいので、一応 LCR 計で計って確かめつつ、1ターン多めに巻いてる。
上エレメントは1.5D-2V、下エレメントとグラウンドエレメントは0.75の普通の電線。一応フロートバラン (1.5D-2V の 12回巻き) も作った (が必要なかった)。
なんとかそこそこ近所でいい感じに広いところがないか探したが案外そういった場所は少ない。
午前中、河川敷の鉄道の高架近くに設営してみたが、バンド内のノイズがひどすぎるのと、そもそも電車が通るたびに全く聞こえなくなるのでそそくさ撤収して帰宅。
夕方になって、今度は近場の公園をいくつか回ってみたが、先客がいたり、設営できる場所がなかったりで諦め、ふたたび河川敷をうろうろして場所を探し、適当な場所に設営してみた。
アンテナアナライザーを忘れたため、内蔵ATUで送信可能にし、30分ぐらいの運用時間で、9局ほど交信してもらった。3W〜4W しか出していないが、普段自宅から50Wで出している電波よりも強く出ているように感じた (コンディションの違いもあるだろうけど)。
河川敷は開放感があって気持ちがよく。案外集中できて良かった。問題はレジャーシートが必要なこと。アンテナ固定する方法がなかなかないこと (今回既存の設置物を使って固定したが、場合によっては怒られそうなので三脚持っていったほうがいいかもしれない)


公園でも試してみようということで、やってみた。交信というよりもアンテナの調整をしようという気持ちでいって、いろいろ試してみた。
結局、バランをつけず 2m 程度のケーブルを使って給電すると 7MHz 帯の CW あたりで、同調しつつ SWR が落ちきってくれるみたいだったので、これでちょっと運用した。
裏で XPO コンテストが走っていたため、近隣の人からはあまり呼ばれず。5W 出しての運用だったが、愛知県や佐賀県など、ちょっと遠めの地域から、599 以外のレポートを丁寧にしてもらうという感じだった。これはこれで大変楽しい。
バンド内がかなり混んでいて、混信をうけつつの交信になったがなんとかなった。混信がひどくなって CL。
10MHz か 14MHz にも同調するかとちょっと試してみたが、10MHz はある程度うまくいくが 14MHz にはうまく同調しなかった。グラウンドエレメント側が長すぎるのかもしれないが、用意が悪くて試行錯誤ができなかった。課題。
公園は案外人の出入りが気になって集中し難い。また、居住地に近いため不審者扱いされそうで怖い。世知辛い世の中なので、不審さをなくす努力がいる。

河川敷での運用は条件が良ければ、本当に最高に気持ちが良いのでまたやりたい。
あとは他にも良さそうな移動場所が近場にないか探したい。以下のような条件にマッチするのがベスト
![]()
![]()
![]()

結論から言うと、DN-10101 は (商品ページには書いてないが) ステレオ入力可能 (ステレオマイク入力)。これはおそらく SD-DAC63095 や USU08B という型番の商品と同じようで、中身は定評のある VIA チップのようだ。中国製品は外見が同じでも中身が全然違うコピー製品もたくさんあるので結構買ってみるまでわからないところがあって、ちょっとした賭けになってしまうけれど、この製品はアタリだと思う。
上海問屋からメール便で買うとマニュアルがないが、以下から英文マニュアルはダウンロードできる。
書いてある通り、このデバイスはステレオマイク入力が可能なので、SDR 用の入力デバイスとして利用できる。96kHz 24bit サンプリングかつステレオ入力ありの小型デバイスというのは世界的に殆ど存在せず、国内販売されているものでは現在唯一といえそう。本来もっと安いが、安いが故に個人輸入すると送料でかえって高くつくので上海問屋で買うようが納期が安定して良い。
KX3 と繋いで SDR 用のサンプリングデバイスとして使ってみたけど何の問題もない感じ。ものすごい変なノイズとかはない。写真の通りかなり小さいので、持ってでかける用途によさそう。
ただ、マイク入力端子は3V程度直流がかかっているので、カップリングコンデンサが入ってないLINE出力な機械に繋ぐとまずそう。KX3 は 10μF 入ってるので大丈夫っぽい。
出力端子もノイズ少なくて良いけど、どうも手元の Mac だと 24bit 出力はできなかった。16bit なら可能。
![]()
![]()
![]()
と、購入から一ヶ月ぐらいかかった (思ったより早かった) が、無事に免許が下りたので運用できるようになり、7MHz帯で2局交信してもらった。
1局目はかなり近い局で、こちらには599+ぐらいで入っていたが、最初5Wで呼んだけどフルコピーできないようだったので10WにQROして599BK。ちゃんと電波出てて良かった。
2局目は CQ を出していたら、山形の局が呼んでくれた。10Wだとどれぐらい熱くなるかなあと思いながら送信してて、あんまり応答に期待はしてなかったけれど (50W でもなかなか呼んでもらえないので)、結構すぐに応答があってテンパってしまった。599BK のつもりで打っていたけれど、向こうの局がQTHやハンドルを送ってくれてコピーできたので、せっかくなのでこちらからも送らせてもらった。ハンドルだけでもわかるというのは感動的 (聞きとれた!というのと、やはりハンドルを知れると相手に親近感が沸く)。
最近練習するときは25wpm〜35wpmぐらいでやっているのだけれど、実際のところは 18wpm ぐらいでやっとソリッドコピーできるかな、という感触なので、18wpm でCQ出すのが今の僕には適切そう。
![]()
![]()
![]()
http://toroids.info/FT140-43.php
このサイト使ってる。好きなトロイダルコアを選んで、適当にパラメータを入力すればあとのものが計算される。つまり
みたいのができる。特に自分で巻く場合線長計算できるのが大変便利。ただ + 10cm ぐらい余分に切らないとだいたいの場合いろいろ厳しい思いをする。
![]()
![]()
![]()
今のところの感触:相手次第だけどDX(海外)にも電波飛んでくれる
アメリカ本土 (ARRL記念局 W1AW/7 = アメリカの西側) と 21MHz帯で交信できた。嬉しい。国内局よりも聞こえるぐらいだったけど、相手が出しているパワーがかなり強い可能性が高いなと思いダメもとで呼んでみたけど大丈夫だった。
最近すこし夜中にCQ出したり、会社いくまえに呼んでみたりしてみてる。意外と国内全域で応答貰えたり呼んでもらったりして面白い。内容は 599BK なのでなんか申し分けないんだけど、それでも面白い。出した電波が直接相手に届くっていう体験そのものが自分には無性に面白い。
![]()
![]()
![]()
Elecraft KX3 を買ったはいいが、電波を出せるようにするためにはこの無線機について国に登録して免許を受けなければならない。国内販売の殆どの無線機は日本の技適を通っているので何も考えなくても免許が下りるのだけれど、KX3 は技適無線機ではないので、面倒なステップがある。
日本において、アマチュア局の無線局免許状を得る際には必ず使用する無線設備について許可を得なければならず、その方法は大きくわけて3つある。
自力で登録証明機関に持ちこんで技適証明を貰うとかという方法もあるけどコストかかりすぎるので普通やらない。今回は2つ目のTSSで保証してもらう方法で、これはアマチュアのみ可能な方法。
以下のような時間感覚ですすんだ (まだ総通の処理待ちだけど) 総通も処理終わった
だいたいメールがくるのが、いつも18時ぐらいだった。
電子申請より紙のほうが早いというのは理解に苦しむけど、たぶん全く自動化せずTSSでも総務省の画面にファイル読みこませてシコシコやってるんじゃないかみたいな遅さなのかもしれない。大変だな
メインは KX3 の保証認定だけど、ついでにPC変調のデジタルモードについても一括で申請した。つまり
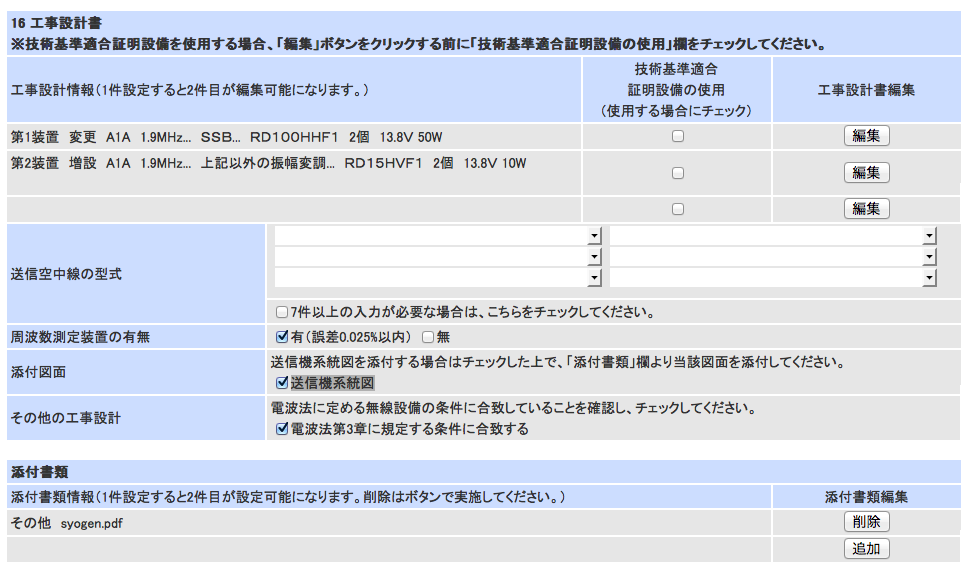
つまりどちらも技適外になる。技適から外れると途端に書く書類が増える。以下のような書類で提出した
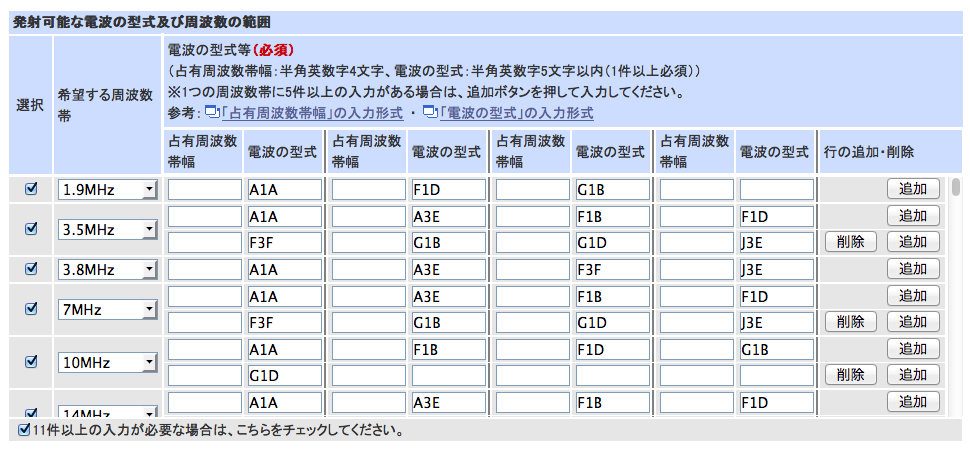
附属装置諸元のPDFに書いた電波形式と、各送信機の送信内容に書いた電波形式が矛盾なく一致していなければならない。これがとにかく手動だと面倒。とりあえず手動で頑張るしかない。

やりたいことはPC変調装置の追加だけなんだけど、これをやった時点で技適の範囲から外れるので基本全部の要求事項を書くハメになって面倒くさい。免許状では一括コード指定だけど、ここは個別の電波形式をバンドごとに全て列挙しなくてはならない。
技適から外れるので、申請時に技適送信機扱いにしてはいけない (「技術基準適合
証明設備の使用」のチェックを入れてはいけない)。ただ、送信機系統図内では、無改造の技適機種の内容は技適番号で省略できることになっているので、そこは楽ができる。
電波形式は取説や別紙諸元とあわせる。変調方式は取説にあわせる。
変調方式、いっぱい聞いたこともないのが並んでいるんだけど、基本「その他の振幅変調」と「その他の周波数変調」「SSB」しか使わないっぽい。FT-450D は A3E が低電力変調でF3Eはリアクタンス変調だけど、どちらも選択肢にはない。電子申請だとこのへん完全に一致するように選択しなければいけないので攻略本が欲しいところ。
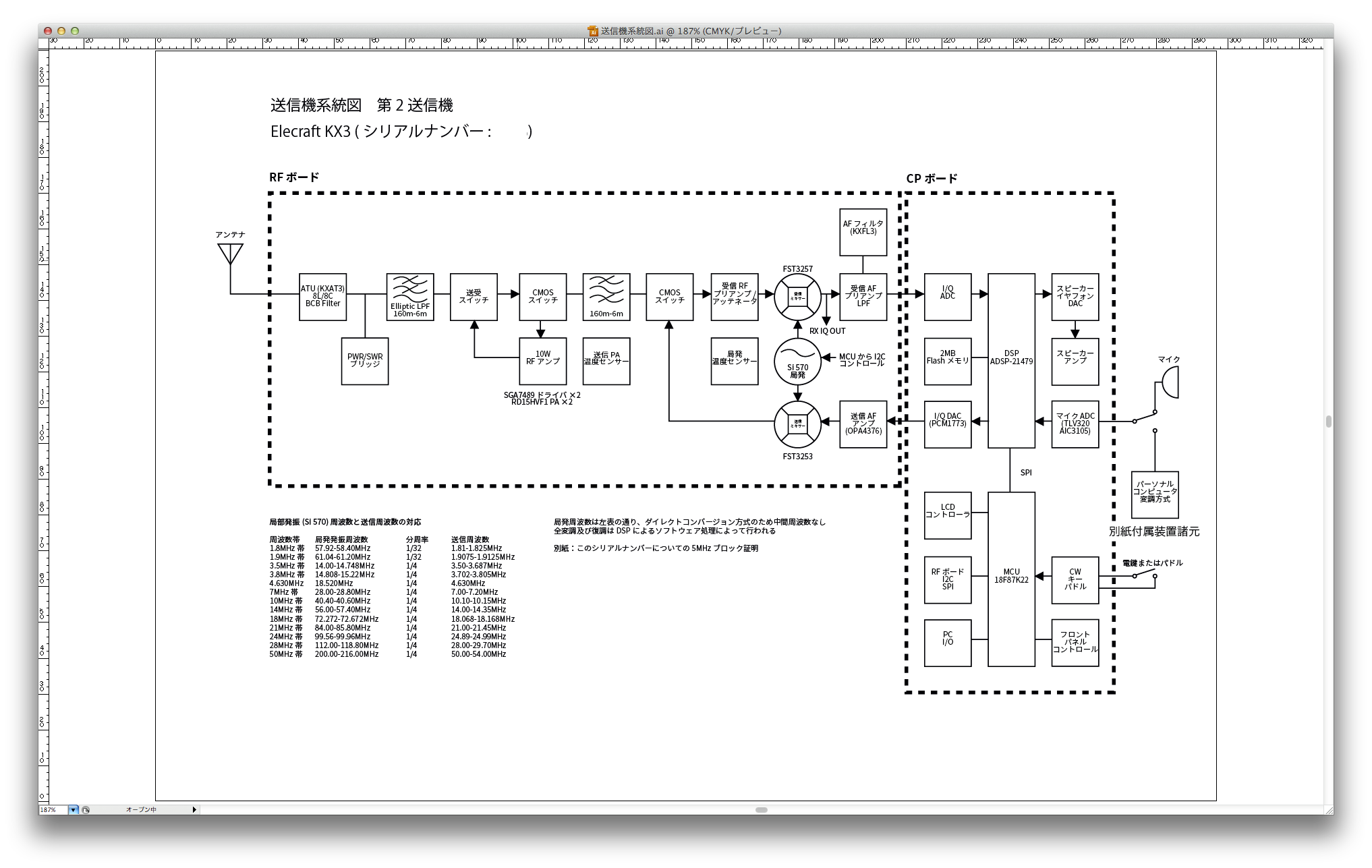
直輸入のものなので若干不安だったけど、直輸入でも日本向け保証に関する必要な資料は最初から含まれていた (局発周波数の表・キーも含めたブロックダイアグラム・5MHzブロック証明・変調方法の解説など)。あとは事前に先人のやった内容とかをググっていたからか KX3 まわりで特別な指摘はなかった。
不安だったけど、このへんは思ったより簡単だった。
書類の形式ミスの指摘が大半だった。あとはデジタルモードの諸元と送信機に書いた電波形式の相違の指摘だった。
ハマったところをメモしておく
電波利用 電子申請・届出システム Lite = sinsei.xml 編集ツール + 申請ツール
TSS 保証認定のときもこのシステムで sinsei.xml を作って、これを総通に申請する変わりに出す (最終的には、保証認定書を添付して総通にも出すけど)。
sinsei.xml はただのXMLなので整合性が保たれていれば手で編集しても問題ない。特に各周波数帯ごとに電波型式を全部書くのはウェブのシステムでやるとただの地獄なので、一通り入力したら「途中保存」を行って sinsei.xml をダウンロードし、手元で編集したほうが早い。(編集して、再度アップロードしてちゃんと思った通り入力されているか確認する)
余談だけどシステムから出力される sinsei.xml はインデントがタブだったりスペースだったりして、ライブラリを使わずに自分で書いてる臭いがする。
を全て書く必要がある。電波形式は各送信機で申請する内容と矛盾なく一致する必要がある。
あと、1.9MHz帯は占有周波数帯幅の制限があり一部電波形式は許可されないので、それを送信機側のの電波形式に含めたりしないようにする必要がある。
これは1から書くとだるすぎるので、ネットでころがってただいたい全部載ってますみたいなのを Google Docs にインポートして、足りてない情報と間違っている情報を直して提出した。
![]()
![]()
![]()



![96kHz/24bit USB DACオーディオ 【Windows8 / MacOS対応】 DN-10101 【あす楽対応】【P12Sep14】[エコ][メ06]](http://hbb.afl.rakuten.co.jp/hgb/?pc=http%3a%2f%2fthumbnail.image.rakuten.co.jp%2f%400_mall%2fdonya%2fcabinet%2fitem24%2f10101-0.jpg%3f_ex%3d240x240&m=http%3a%2f%2fthumbnail.image.rakuten.co.jp%2f%400_mall%2fdonya%2fcabinet%2fitem24%2f10101-0.jpg%3f_ex%3d80x80)