
✖
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
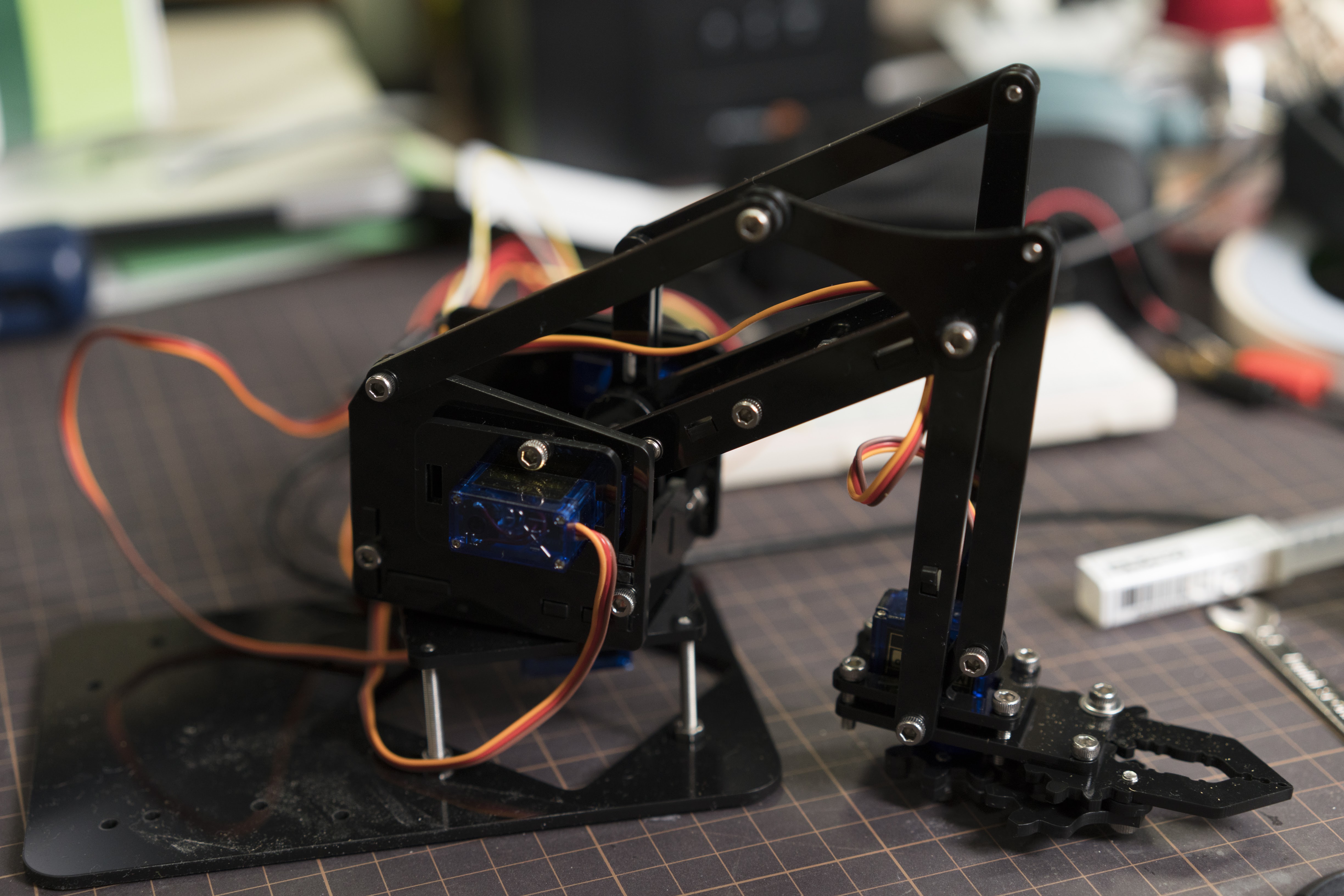
MeArm のパクりっぽいやつ(設計はオープンだからパクりとはいわない気はする)を AliExpress で買ってみました。https://shop.mime.co.uk/
ロボットアームは複数の関節の回転運動を同時に行って特定座標への移動を行います。よって、実座標系からサーボモータの制御回転角への変換処理が必要になります。
FK は関節の根本から回転させていって先端の座標を求める処理で、IK は先端座標から逆算して関節の回転角を求める処理です。ロボットアームの場合は IK ができれば良いことになります。
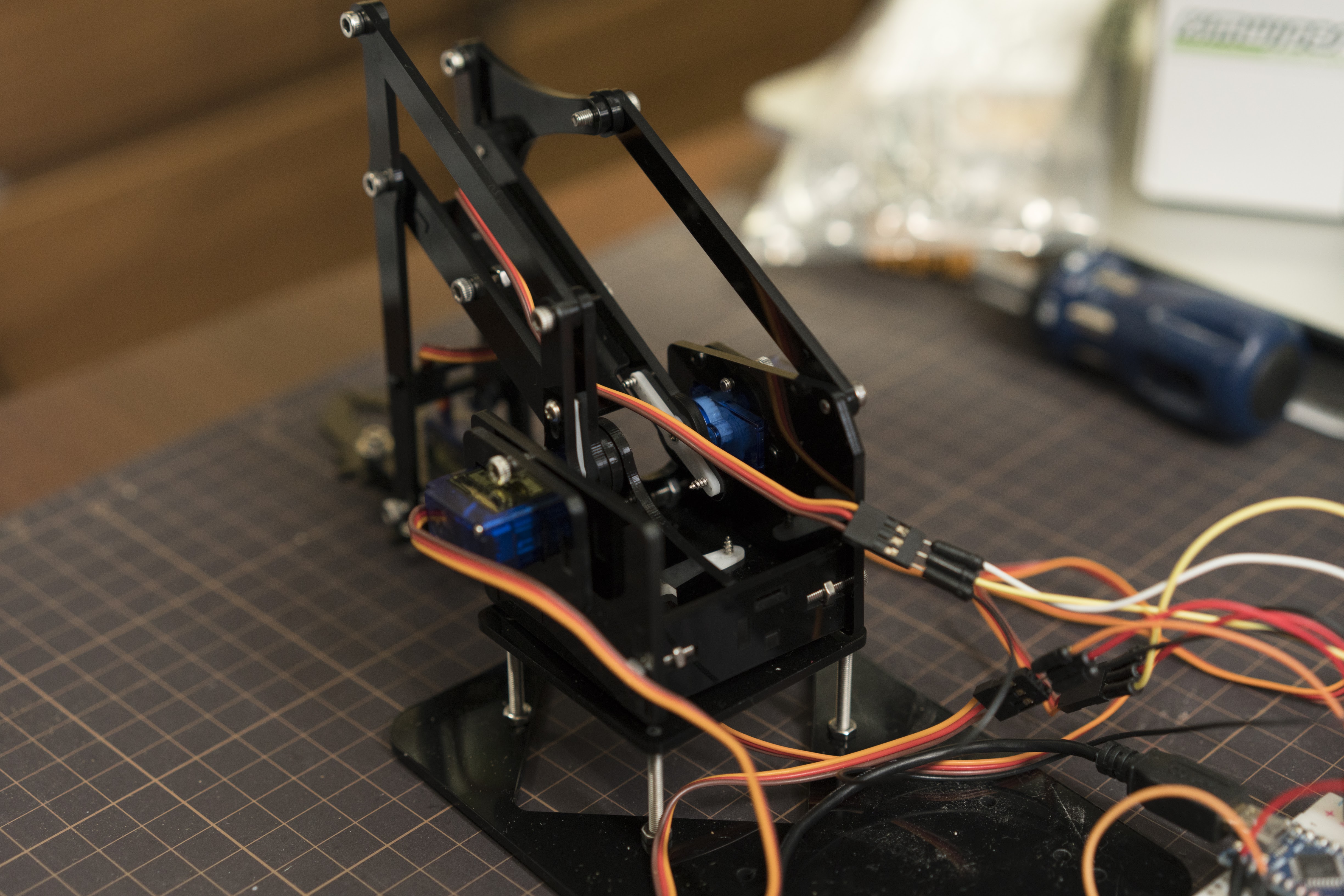
MeArm は根本にサーボモータが設置されておりリンク機構を介して関節を動かしているので、サーボモータの角度と関節の角度の対応を理解する必要があります。
の3つの要素があり、順に変換していく必要があります。
ベースは簡単です。90°で正面を向くようにして、0〜180°で可動します
ショルダーも簡単です。90°でアームが真上を向くようにして、30〜150° (後〜前) 程度で可動します。
これは若干ややこしいです。MeArm の構造の場合、ショルダーの動きによって肘関節も連動してしまうためです。
エルボー用サーボは90°でアームが後ろに向くようにして、0°でアームが真上、180°でアームが真下に向くようにしてあります。
このセットアップでショルダー用サーボが90°、エルボー用サーボが90°のとき、肘関節も90°になります。ショルダー用サーボの角度が変化すると、肘関節もその角度分だけ動くため、エルボー用サーボに与える角度はショルダー用サーボに与える角度をひいて求める必要があります。
mbed 用の実装 と Arduino用のインターフェイスを混ぜたような実装を書いて実験しました。
正確に動かすためには正確に制御方法を理解する方法があるので、結局ある程度自分でコードを試行錯誤して理解する必要がある気がします。
キャリブレーション方法が特に難しいのですが、以下のような方法で行いました。ロジックがあっていることが大前提ですが「動かしてみてあってるか確認する」のが難しいので、コードの検証はしっかりやらないとダメです。
#include <Arduino.h>
#include <Servo.h>
#include "math.h"
#include <Servo.h>
#define DEBUG 0
constexpr float DEG2RADIAN(float deg) {
return deg * M_PI / 180;
}
constexpr float RADIAN2DEG(float rad) {
return rad * 180 / M_PI;
}
class MeArm {
private:
Servo base, shoulder, elbow, claw;
float baseServoMin, baseServoMax, baseCoefficient, baseOffset;
float shoulderServoMin, shoulderServoMax, shoulderCoefficient, shoulderOffset;
float elbowServoMin, elbowServoMax, elbowCoefficient, elbowOffset;
float clawServoMin, clawServoMax, clawCoefficient, clawOffset;
float currentX, currentY, currentZ;
public:
static const int16_t LENGTH_SEGMENT0 = 18; // base to shoulder
static const int16_t LENGTH_SEGMENT1 = 80; // shoulder to elbow
static const int16_t LENGTH_SEGMENT2 = 80; // elbow to wrist
static const int16_t LENGTH_SEGMENT3 = 55; // wrist to grip point
static const int16_t LENGTH_BASE_HEIGHT = 60;
static const int16_t MAX_REACH = 220;
static constexpr float lawOfCosines(float adj1, float adj2, float opp) {
return acos((adj1*adj1 + adj2*adj2 - opp*opp) / (2*adj1*adj2));
}
MeArm() {
setServoCoefficient(
0, 180, 1, 0,
0, 180, -1, 0,
0, 180, -1, 0,
0, 180, 1, 0
);
}
void begin(int pinBase, int pinShoulder, int pinElbow, int pinClaw) {
base.attach(pinBase);
shoulder.attach(pinShoulder);
elbow.attach(pinElbow);
claw.attach(pinClaw);
base.write(90);
shoulder.write(90);
elbow.write(90);
claw.write(90);
}
void setServoCoefficient(
float _baseServoMin, float _baseServoMax, float _baseCoefficient, float _baseOffset,
float _shoulderServoMin, float _shoulderServoMax, float _shoulderCoefficient, float _shoulderOffset,
float _elbowServoMin, float _elbowServoMax, float _elbowCoefficient, float _elbowOffset,
float _clawServoMin, float _clawServoMax, float _clawCoefficient, float _clawOffset
) {
baseServoMin = _baseServoMin;
baseServoMax = _baseServoMax;
baseCoefficient = _baseCoefficient;
baseOffset = _baseOffset;
shoulderServoMin = _shoulderServoMin;
shoulderServoMax = _shoulderServoMax;
shoulderCoefficient = _shoulderCoefficient;
shoulderOffset = _shoulderOffset;
elbowServoMin = _elbowServoMin;
elbowServoMax = _elbowServoMax;
elbowCoefficient = _elbowCoefficient;
elbowOffset = _elbowOffset;
clawServoMin = _clawServoMin;
clawServoMax = _clawServoMax;
clawCoefficient = _clawCoefficient;
clawOffset = _clawOffset;
}
// https://developer.mbed.org/users/eencae/code/MeArm/docs/tip/MeArm_8cpp_source.html
// by eencae
bool solveInverseKinematics(
float x, float y, float z,
float& thetaBase, float& thetaShoulder, float& thetaElbow
) const {
float target = sqrt(x * x + y * y);
if (target > MAX_REACH) return false;
float wrist = target - LENGTH_SEGMENT3;
float shoulder = LENGTH_SEGMENT0;
// shoulder to wrist
float s2w = sqrt( (wrist - shoulder) * (wrist - shoulder) + (z - LENGTH_BASE_HEIGHT) * (z - LENGTH_BASE_HEIGHT) );
if (s2w == 0.0) {
return false;
}
if (DEBUG) {
Serial.print("x = "); Serial.print(x); Serial.print(" ");
Serial.print("y = "); Serial.print(y); Serial.print(" ");
Serial.print("z = "); Serial.print(z); Serial.print(" ");
Serial.print("target = "); Serial.print(target); Serial.print(" ");
Serial.print("wrist = "); Serial.print(wrist); Serial.print(" ");
Serial.print("shoulder = "); Serial.print(shoulder); Serial.print(" ");
Serial.print("s2w = "); Serial.print(s2w); Serial.print(" ");
}
float thetaSw = acos( (wrist - shoulder) / s2w );
if (isnan(thetaSw)) {
Serial.println("invalid thetaSw");
return false;
}
if (z < LENGTH_BASE_HEIGHT) {
thetaSw *= -1.0;
}
float thetaElbow0 = lawOfCosines(LENGTH_SEGMENT1, LENGTH_SEGMENT2, s2w);
if (isnan(thetaElbow0)) {
Serial.println("thetaElbow0 is NaN");
return false;
}
float thetaShoulder0 = lawOfCosines(s2w, LENGTH_SEGMENT1, LENGTH_SEGMENT2);
if (isnan(thetaShoulder0)) {
Serial.println("thetaShoulder0 is NaN");
return false;
}
thetaShoulder = thetaSw + thetaShoulder0;
thetaElbow = thetaElbow0;
thetaBase = atan2(y, x);
return true;
}
bool convertIKAnglesToServoAngles(
float thetaBase, float thetaShoulder, float thetaElbow,
float& thetaBaseServo, float& thetaShoulderServo, float& thetaElbowServo
) {
thetaElbow = M_PI - thetaShoulder - thetaElbow;
// thetaElbow = thetaElbow - thetaShoulder - (M_PI/2.0);
if (DEBUG) {
Serial.print(" beta="); Serial.print(RADIAN2DEG(thetaElbow)); Serial.print(" ");
}
// convert angles to real angles
thetaBaseServo = RADIAN2DEG(thetaBase) * baseCoefficient + baseOffset;
if (thetaBaseServo < baseServoMin) thetaBaseServo = baseServoMin;
if (baseServoMax < thetaBaseServo) thetaBaseServo = baseServoMax;
thetaShoulderServo = RADIAN2DEG(thetaShoulder) * shoulderCoefficient + shoulderOffset;
if (thetaShoulderServo < shoulderServoMin) thetaShoulderServo = shoulderServoMin;
if (shoulderServoMax < thetaShoulderServo) thetaShoulderServo = shoulderServoMax;
thetaElbowServo = RADIAN2DEG(thetaElbow) * elbowCoefficient + elbowOffset;
if (thetaElbowServo < elbowServoMin) thetaElbowServo = elbowServoMin;
if (elbowServoMax < thetaElbowServo) thetaElbowServo = elbowServoMax;
return true;
}
bool goDirectlyTo(float x, float y, float z) {
float thetaBase, thetaShoulder, thetaElbow;
bool ok = solveInverseKinematics(x, y, z, thetaBase, thetaShoulder, thetaElbow);
if (DEBUG) {
Serial.print("goDirectlyTo "); Serial.print(ok); Serial.print(" ");
Serial.print(RADIAN2DEG(thetaBase)); Serial.print(" ");
Serial.print(RADIAN2DEG(thetaShoulder)); Serial.print(" ");
Serial.print(RADIAN2DEG(thetaElbow)); Serial.print(" ");
}
if (ok) {
convertIKAnglesToServoAngles(
thetaBase, thetaShoulder, thetaElbow,
thetaBase, thetaShoulder, thetaElbow
);
if (DEBUG) {
Serial.print("converted: ");
Serial.print(thetaBase); Serial.print(" ");
Serial.print(thetaShoulder); Serial.print(" ");
Serial.print(thetaElbow); Serial.print(" ");
}
base.write(thetaBase);
shoulder.write(thetaShoulder);
elbow.write(thetaElbow);
currentX = x;
currentY = y;
currentZ = z;
if (DEBUG) Serial.println("");
return true;
} else {
if (DEBUG) Serial.println("");
return false;
}
}
bool gotoPoint(float x, float y, float z, float step=5, float wait=20) {
float x0 = currentX;
float y0 = currentY;
float z0 = currentZ;
float distance = sqrt((x0-x)*(x0-x)+(y0-y)*(y0-y)+(z0-z)*(z0-z));
for (float i = 0; i < distance; i+= step) {
bool ok = goDirectlyTo(x0 + (x-x0)*i/distance, y0 + (y-y0) * i/distance, z0 + (z-z0) * i/distance);
if (!ok) return false;
delay(wait);
}
bool ok = goDirectlyTo(x, y, z);
if (!ok) return false;
delay(wait);
return true;
}
void openGripper() {
moveGripper(M_PI/2);
}
void closeGripper() {
moveGripper(0);
}
void moveGripper(float thetaClaw) {
float thetaClawServo = RADIAN2DEG(thetaClaw) * clawCoefficient + clawOffset;
if (thetaClawServo < clawServoMin) thetaClawServo = clawServoMin;
if (clawServoMax < thetaClawServo) thetaClawServo = clawServoMax;
claw.write(thetaClawServo);
}
};
MeArm arm;
void setup() {
Serial.begin(9600);
Serial.println("start");
if (0) {
Serial.println("debug");
Servo middle, left, right, claw ; // creates 4 "servo objects"
middle.attach(2);
left.attach(3);
right.attach(4);
claw.attach(5);
middle.write(90);
left.write(90);
right.write(90);
claw.write(120);
for (;;);
uint16_t prev = 0;
for (;;) {
uint16_t read = static_cast<uint32_t>(analogRead(0)) * 180 / 512;
if (read != prev) {
Serial.print("read=");
Serial.println(read);
left.write(read);
prev = read;
delay(250);
}
}
for (;;) {
Serial.println("0");
left.write(0);
right.write(0);
delay(2000);
Serial.println("90");
left.write(90);
right.write(90);
delay(2000);
Serial.println("180");
left.write(180);
right.write(180);
delay(2000);
}
}
arm.begin(2, 4, 3, 5);
arm.setServoCoefficient(
0, 180, 1, 0,
20, 170, -1, 170,
20, 130, -1, 106,
75, 115, -0.5, 115
);
arm.goDirectlyTo(0, 100, 50);
// arm.openGripper();
}
void loop() {
Serial.println("loop");
// arm.gotoPoint(0,100,50);
//
// arm.goDirectlyTo(0, 110, 60); delay(1000);// b=90 s=90 e=30
// arm.goDirectlyTo(100, 110, 60); delay(1000);// b=90+45 s=100 e=40
// arm.goDirectlyTo(100, 160, 60); delay(1000);// b=90+45 s=120 e=45
arm.openGripper();
arm.gotoPoint(0,110,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(100,110,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(100,160,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint( 0,160,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(-100,160,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(-100,110,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint( 0,110,60); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.closeGripper();
delay(1000);
arm.openGripper();
arm.gotoPoint(0,110,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(100,110,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(100,160,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint( 0,160,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(-100,160,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(-100,110,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint( 0,110,20); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.closeGripper();
delay(1000);
arm.openGripper();
arm.gotoPoint(0,110,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(100,110,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(100,160,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint( 0,160,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(-100,160,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint(-100,110,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.gotoPoint( 0,110,110); arm.openGripper(); delay(250);arm.closeGripper(); delay(250);
arm.closeGripper();
delay(1000);
}
![]()
![]()
![]()

1000円の時計。3年前に買って、去年に電池を交換したけど、バンドがかなりヘタって、もうダメという感じだったので交換した。
![[ランドン] 【バネ棒+工具付】 時計ベルト 時計バンド 本革 カーフ 18mm 茶 - Randon(ランドン)](https://m.media-amazon.com/images/I/41kAFZm6hYL._SL500_.jpg)
780円。交換は簡単。今のところは問題ないみたい。これにより 1780円+オレの技術料 の価値の時計となった。
![]()
![]()
![]()
![]()
![]()
![]()
鏡を使うと外から瞳孔を見ることはできるけど、内側は解剖しないと普通は見れない。しかしピンホールを使うと直接自分の瞳孔を観察できた。
T=0.05mm のステンレス板に φ0.1mm の穴をあけてみたところ (ピンホール)、これに目をできるだけ近づけてそこそこ強い光源を見ると、自分の瞳孔を見ることができることに気がついた。
ある程度小さい穴なら以下のような現象が再現できるので、手でピンホールを作って室内蛍光灯とかを見るだけでよかった。

こんな感じにして穴を片目にあてる。単に穴を通して向こう側が見えるだけに思えるが、もう片方の眼にあたる光を手で遮ったりすると瞳孔の動きがわかる。(瞳孔は左右の眼で同時に変化するので、観察している眼と逆の眼の光量を変えてやる)
歪な形の穴を通した場合、光量によって歪な形のまま大きさが変化する。いまいちなんで瞳孔の動きが観察できるのかわからない。
一定の光源のはずの円内はまだら模様にみえる。
その周辺にはぎざぎざした縁の円があって、急激に暗くなる。
片方の眼を遮光した状態で、もう片方の眼にピンホールをあてると大きな円が見える。この状態のまま片目の遮光を外すと急激に円が収縮する。もう一度遮光しなおすとゆるやかに円が拡大する。
よくみると静止していても円は拡大したり収縮したりする。
光源と網膜の間でこのような動きをするのは瞳孔だけなので、これは瞳孔だと思う。
まだら模様は眼球を回転させても移動しない。瞳孔の大きさも関係ない。常に一定の模様が見える。
角膜・水晶体・硝子体のうちのどれかが関係してそうだけどわからない。ちなみに角膜前についた埃も見えるのだけど、まだら模様よりすこし遅れて動くことから、たぶん角膜表面よりは瞳孔に近そう。
よくわからない。ピンホールを近づけすぎると、ピンホールが作る像が瞳孔でケラれてしまうからかな? だとすると瞳孔が見えているというよりは虹彩の影が見えているといえる。
![]()
![]()
![]()
![]()
![]()
![]()
とにかく最悪の夢を見た。悪意のある人間しかでてこない、終始みじめな思いをしながらどこかに向かうようなやつ。どうしようもない。
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
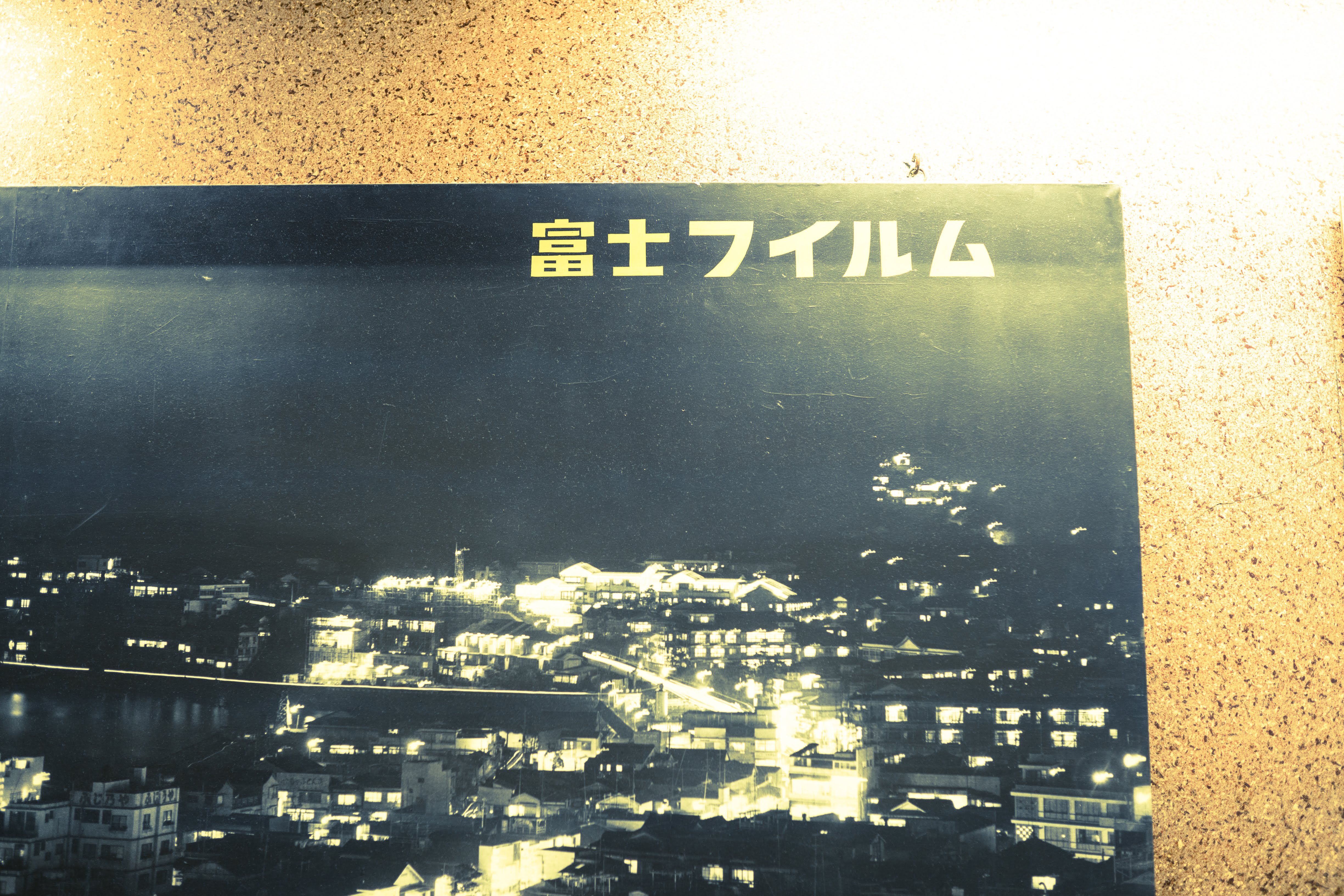
しばらく写真を現像時にあまりいじらないようにしてたけど、やっぱそういうんじゃないなと思ってやめることにする。しかし積極的にいじっていこうってのもおもいのほか難しい。「現実を優先すべき」という固定観念にとりつかれており (撮って出し信仰の亜種)、これをふりはらって「こういう絵が好きなんだ」とするためには自信が必要だろう。
一見した自然さよりもフィクション感のほうが好きだなと思う。高解像度で、はっきりとした現実感があるにも関わらずフィクション的な絵にすると、現実をゲームのレンダリングエンジンで見ているようで面白い。元気なうちは、眼で見れるものはそのまま眼で見れば良いのであって、レンズを通さなくて良い。
とりあえず Lightroom のクロスプロセス3種が結構良いので雑に適用してからハイライト・シャドウの色相いじったりするのが早い。
![]()
![]()
![]()
![]()
![]()
![]()

これを読んだ。おおむねOCD(強迫性障害)の治療についての話。原著は1997年なので丁度20年前の本。
なぜOCDを題材とするか?という疑問があったけど、本文中で理由も述べられていた。「プラセボが効かない」「症状を患者自身で自覚できる」「脳のPET検査に症状がでる」あたりから科学的に効果が検証可能であり、治療の結果として患者の意思と行動により脳で起こっている症状を改善できる (思考と行動により脳の活動を変化させて治療することができる) ことがわかったから、と理解した。
OCDがメインだけど、他のことにも応用できると書いてある。他のことに応用するときに重要なのは、自分がそれを直したいと思えるか。
本文は繰り返し繰り返し症例 (具体例) と4段階法の実践方法が書いてある。ひたすら繰り返しなので飽きるっちゃ飽きる。
この本はだいたいは行動療法と書いてあるけど、認知行動療法とあまり区別されてはいない。
「公平な観察者」(アダム・スミスの概念) を有効活用・強化し気付き(マインドフルネス)を得ることが重要とのこと。昨今のマインドフルネスの流行りにのって新装版が出たのかな?
元々はアダム・スミスが言いだした概念らしい。アダム・スミスといえば「神の見えざる手」の人で、自分の中では「市場原理の人」というイメージから経済学の人だと思っていたが、哲学者だったようだ (常識なんだろうが)。
「公平な観察者」は自分のなかにある利害から独立して客観的に自分を判断する存在。なんとなく確かにそういうものは自分のなかにはあることはわかる。表層的な行動、というよりも自動的な反応に対して、一方でそれを認知し正確な判断をし、善し悪しの裁定を行う。
マインドフルネスって言葉が流行ってるけど、瞑想と混同されている。瞑想はつまり「公平な観察者」の能力を高める方法論なのではないかと思う。反応の前に確実に公平な観察者の裁定を行い、行動する。そのために一旦は刺激は受容したうえでおいておく。というか「公平な観察者」と「気付き (=マインドフルネス)」はほぼ同じもので、公平な観察者の能力に注目したものがマインドフルネスではないかと思った。まぁ言葉の定義よりも心を鍛えよという話なのだが……
新装版だと前書きにこういう言葉が増えているが、この本だと公平な観察者との違いがいまいちわからなかった。
![]()
![]()
![]()
1泊で熱海にいった。







今まで見た神社のなかで一番演出が近代的な感じだった。全体的にやたらセンスよくデザインされているというかなんというか…… 奥の大楠の前ののれんの演出とか案内板とか。参集殿が新しくて喫茶が併設されている。パンフレットも普通のと違った折りサイズなので目をひく。

Instagram 最適化用の自撮り用のスタンドが各所に置いてあった。PhotoStand と書いてある自撮り棒なしでスマフォをたてて独りで撮影できるようになってる。
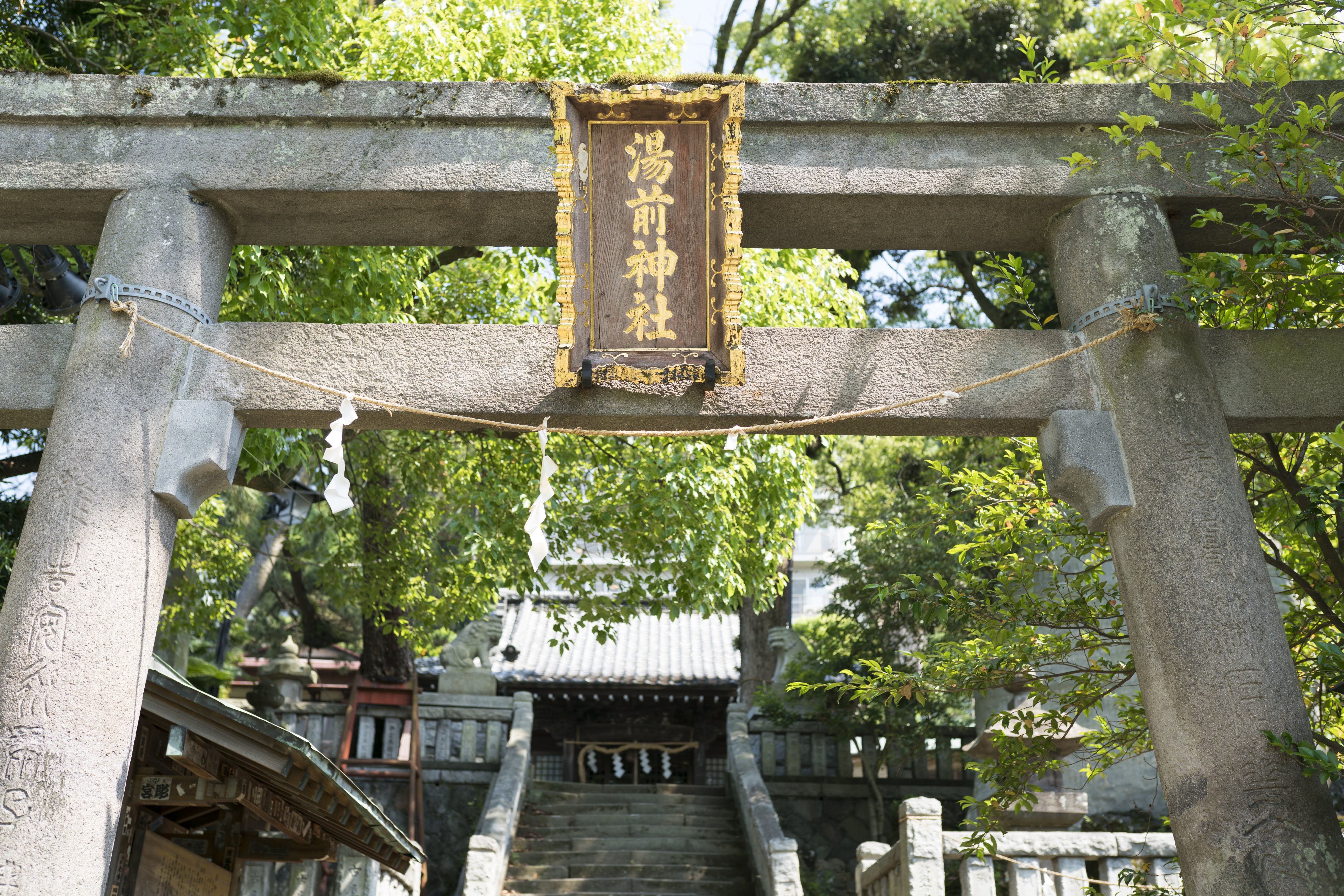
大湯間歇泉のすこし上にある神社。


特にこれを見にいったというわけではないんだけど、秘宝館のある山の上にあって熱海市内だとほとんどどこからでも見えて目立つ。Google Maps だとここ
キャパシティハットがついてる。1161kHz で波長 258m。空中線電力は 100W らしい。NHK熱海錦ヶ浦テレビ中継局も同じ場所にあるのだが、木に遮られて下からはほとんど見れない。

熱海は城下町ではなくてこれは昭和34年に観光用に作られた城なんだけど、完璧な昭和の観光スポット感がものすごかった。なんのコンセプトもなくてカオスな感じ。間違いなくハズれ観光スポットなので、そういうのが好きな人向けといえそう。
来宮神社の、由緒的にいったら圧倒的に古いにも関わらず統一された近代的なデザイン感と対照的で逆に面白いともいえる。
![]()
![]()
![]()










