なんとなくもう一台を作りたくなったので作っています。実は基板自体はだいぶ前(数ヶ月以上前)に作っておいたのですが、設計ミスがあったりして面倒なのでちゃんと作りはじめてませんでした。
AD8307
AD8307を使ってログアンプ検波するバージョンの SWR 計の例があることは知っていましたが、前回はそこまですることはないと思ってとりあえず簡単な方法で作りました。
というのもログアンプは大変高価だからです。秋月でAD8307のDIP版が売っていますが、単価が1100円します。なお DigiKey で買うともっと高価なので、秋月は安いほうです。
(最近知りましたが中華性AD8307というセカンドソース品、というよりコピー品があり、こちらは単価が50円!!と激安のようです。SOICで、ebay で手に入ります)
方向性結合器 + 検波 + ADC
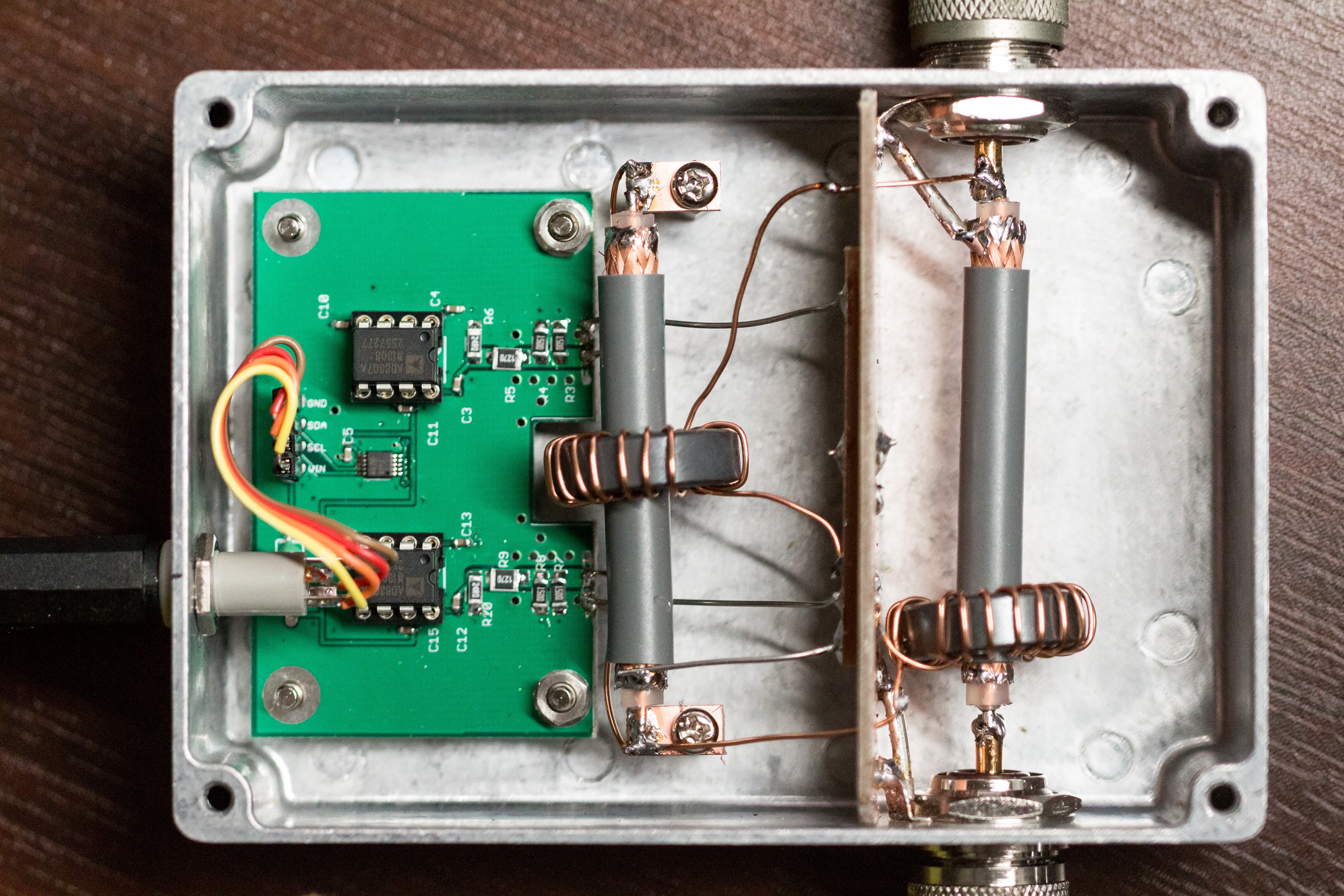
例の回路をほぼ完全にパクって実装しました。
方向性結合器は、タンデムマッチで、FT82-43 を使い、20T にしてみました (26.02dB のカップラに)。線間容量を減らして、高い周波数での特性が改善しないか?と思い巻数を減らしています。#43 は透磁率が高いので、多少巻数を減らしてもインピーダンスは高いままですが、ロスは多くなるはずです。
検波部は結合器からの出力をアッテネータ(16.1dB)を通し、インピーダンス変換を行なって AD8307 に入力しています。AD8307 のオフセットや切片調整はしていないので、25mV/dB の出力にはるはずです。
方向性結合器で 26.02dB、アッテネータで16.1dBなので、AD8307 には 42.12dB 減衰された信号が入力されます。言いかえると、AD8307の入力範囲は -72〜+16dBm ですから、-29.88〜+58.12dBm の入力範囲 (約1μW〜648W) にシフトしたことになります。
ADC は ADS1015 という 4ch + PGA 付き I2C デバイスにしてみました。ここは入手性の問題からオリジナルと違います。
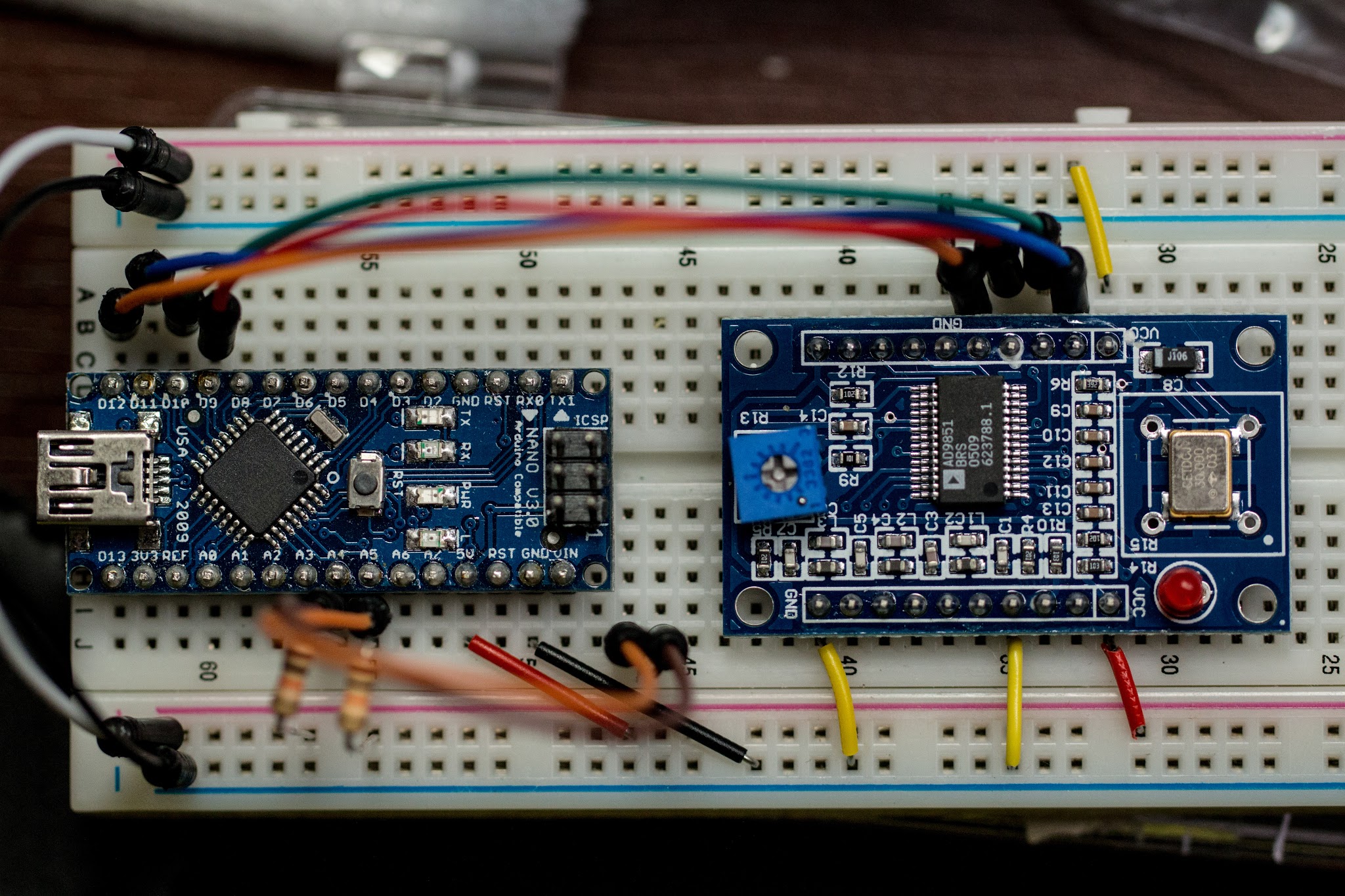
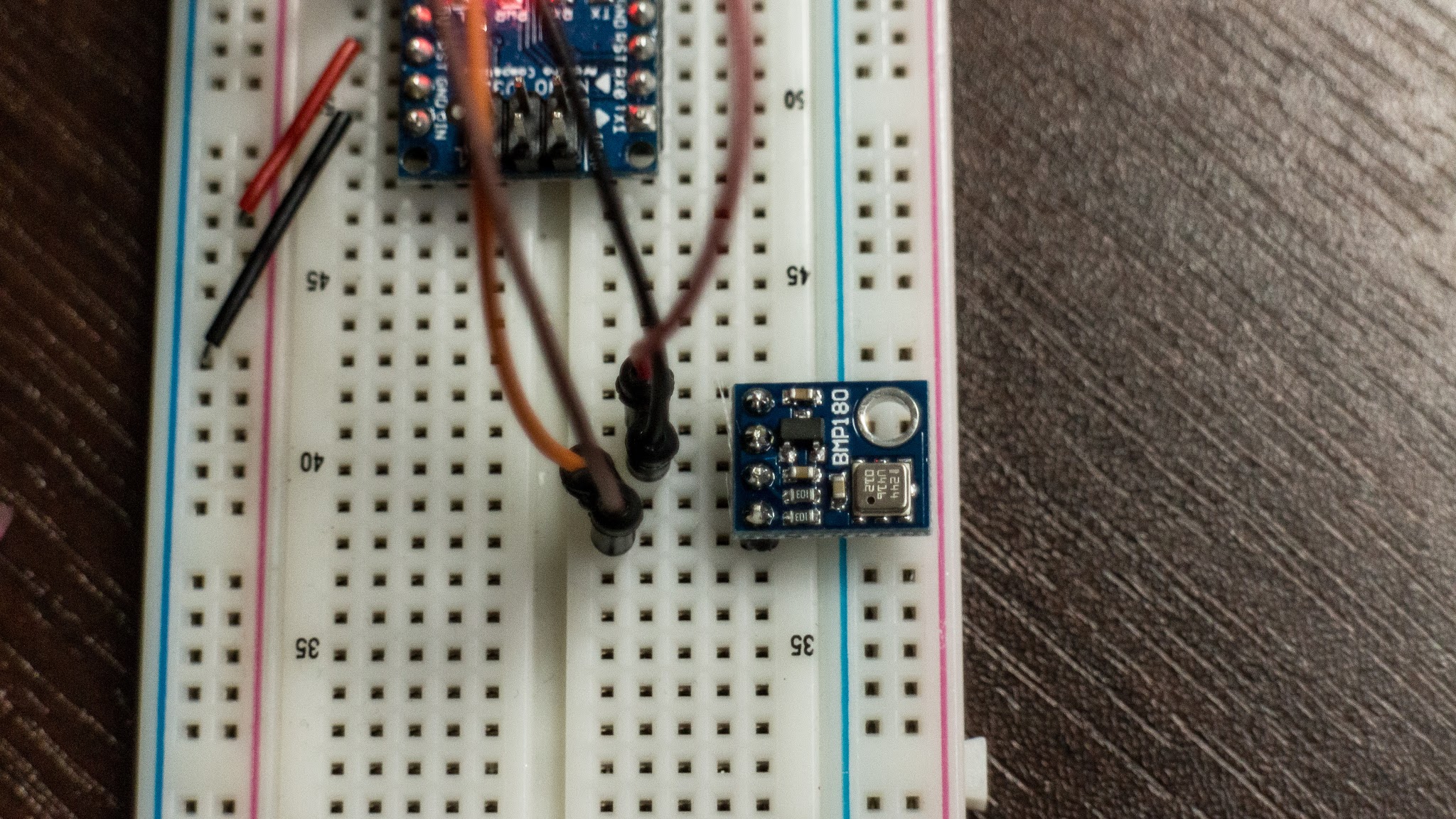
実装
最初は方向性結合器の部分も基板を起こしていましたが、どうも作りにくいので立体配線に変えました。2つのトロイダルコアの間に容量結合防止のためのGNDを立てたいわけですが、プリント基板だとかえって面倒でした。
そんなこともあろうかと、基板を作る段階で途中で切って使えるような感じにしておいたので良かったです。
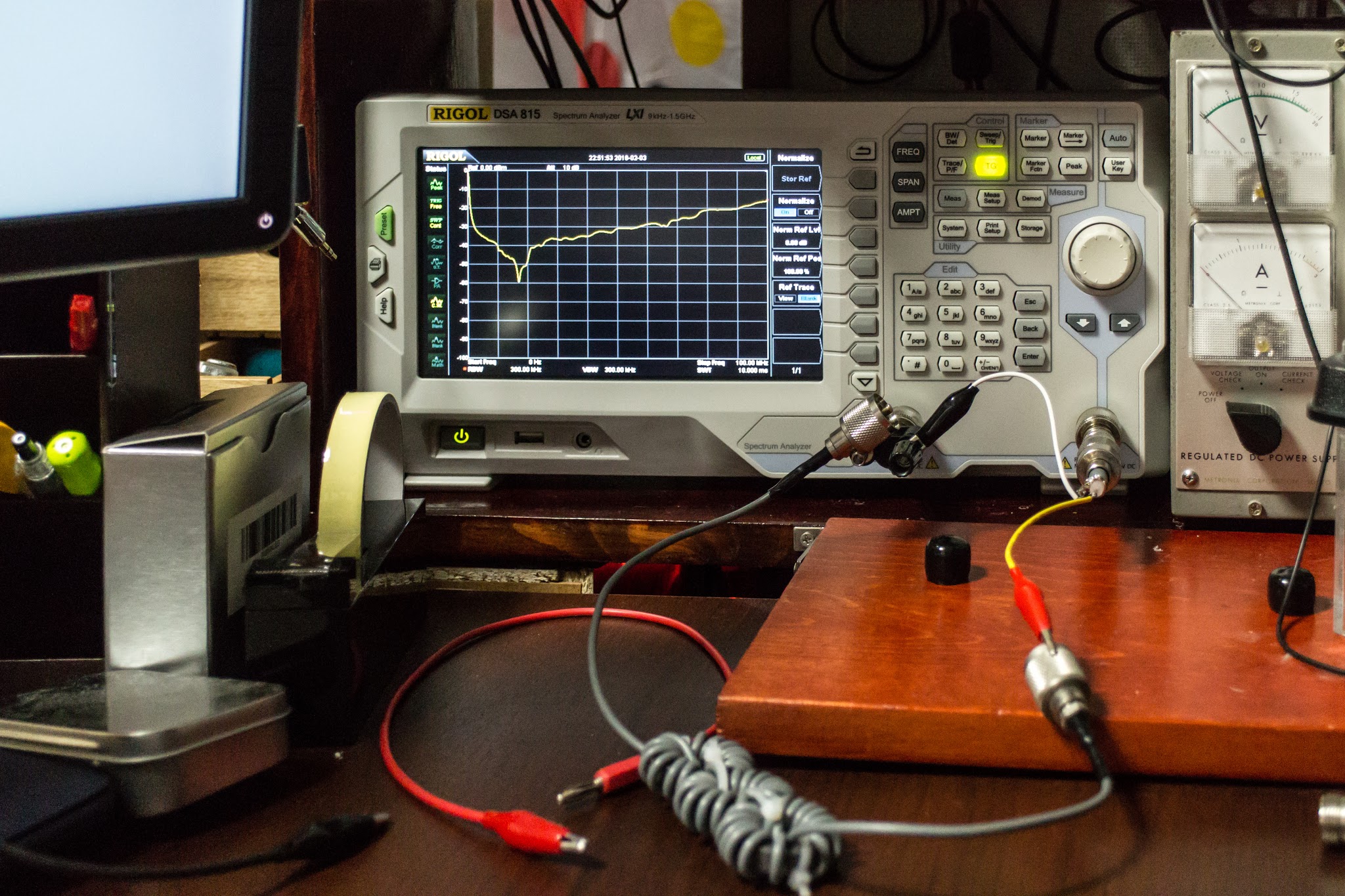
検証
作ったはいいのですが、どうもうまくいかず悩みました。
一つはコイルを逆付けしていてまともに方向性結合器として動いていなかったのが原因でした。
もう一つはAD8307の出力の問題で、どうしても入力電力から計算される出力電圧が出ず、未だ完全に理由がわかっていません。
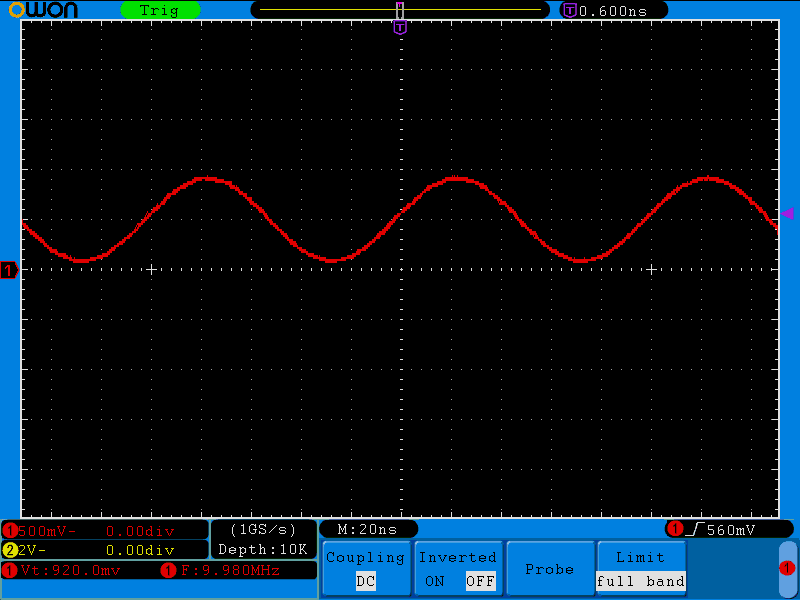
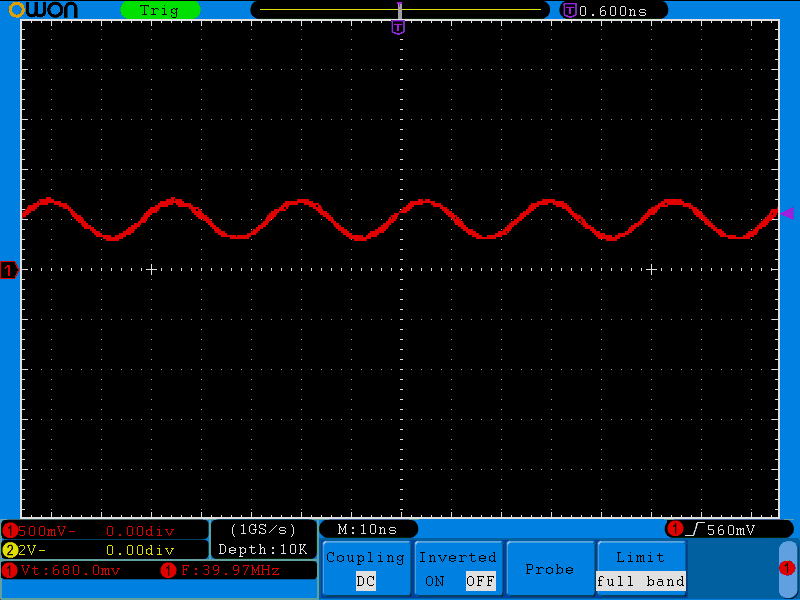
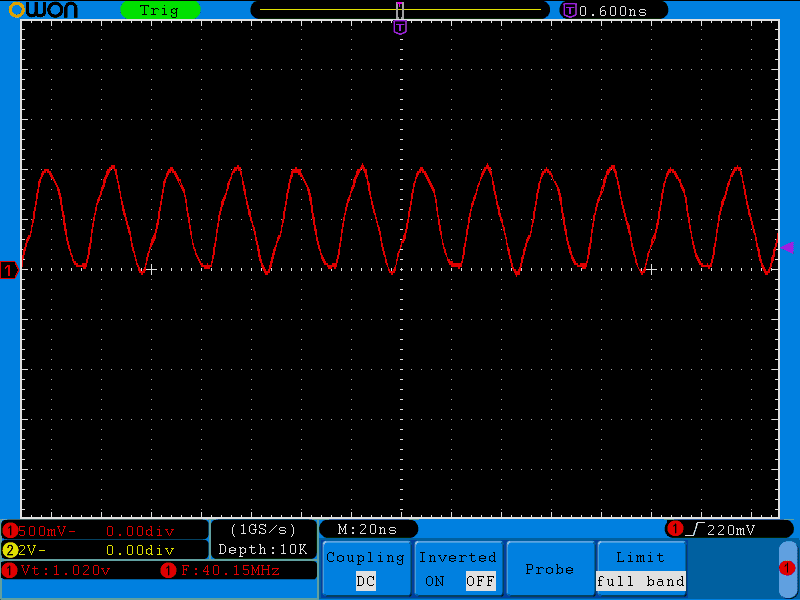
AD8307 の出力
最初は 3.3V で動かしていたのですが、どうしても途中から出力電圧が上がりませんでした。定格上では 3.3V でも +10dBm までは入力可能のはずなのですが、-2dBm ぐらいから出力が上がらなくなり、全くよくわかりませんでした。
5V で動かしてみたところ、とりあえずこれは解決したように見えました。
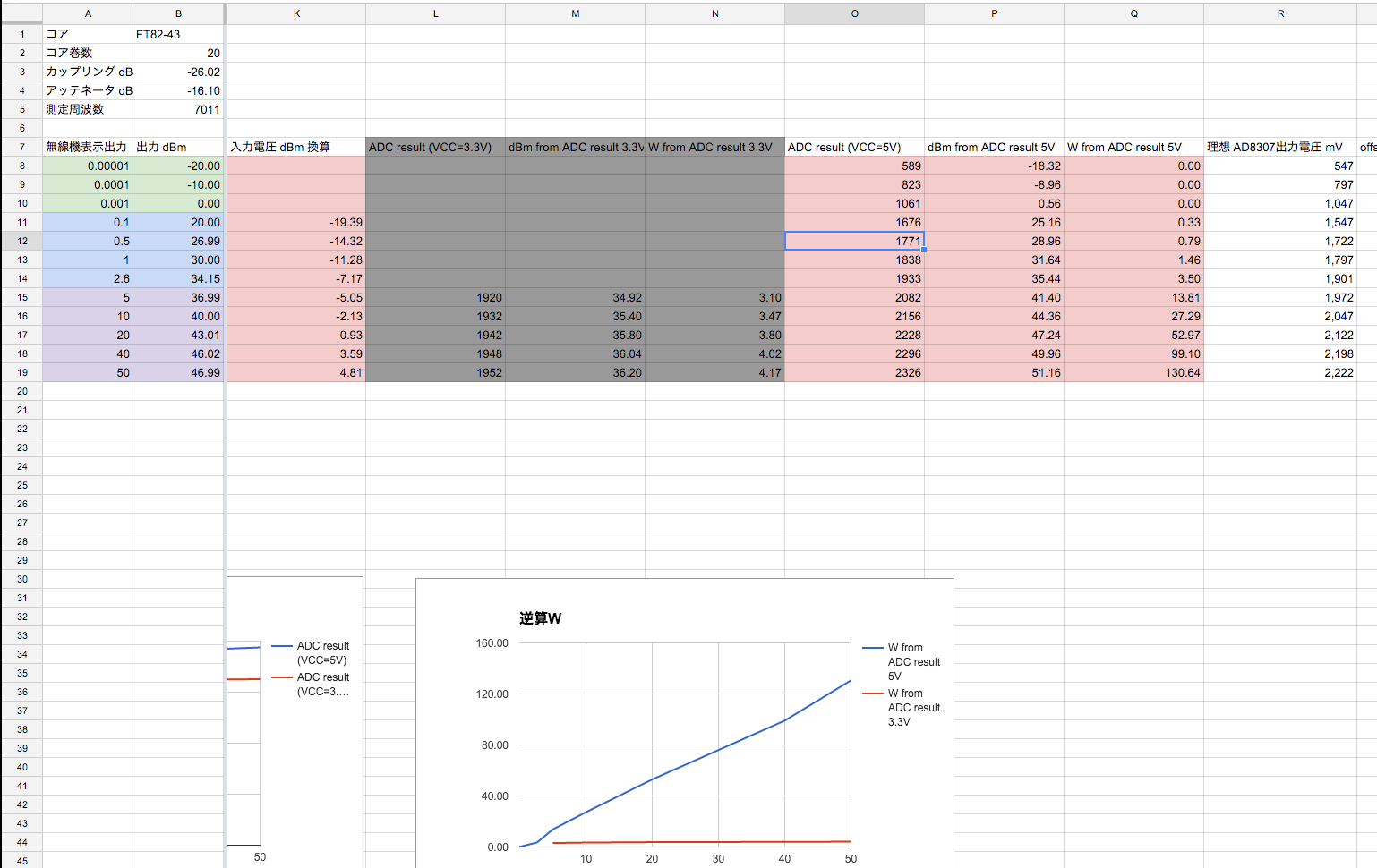
しかし電源電圧を 5V に変えても、入力電力に応じた出力電圧にならず難儀しました。どうしても 25mV/dB の傾きになっておらず、オフセットが含まれているように見えました。切片調整もしていないし、オフセットがどこから入っているのかもわかりませんでした。
結局これはキャリブレーションと称してプログラム上で補正をかけることにしました。どっちにしろ 25mV/dB の傾きは定格上でも 23〜27mV/dB の範囲があるので調整を入れなければなりません。
ということで、適当に係数を求めたら、だいたいそれっぽい値が出るようにはなりました。
正確な電力を計る方法がないので、一定以上は調整しようがありません。
Google Spreadsheet に実測と理想を書いて比較してがんばりました。。。
方向性結合器
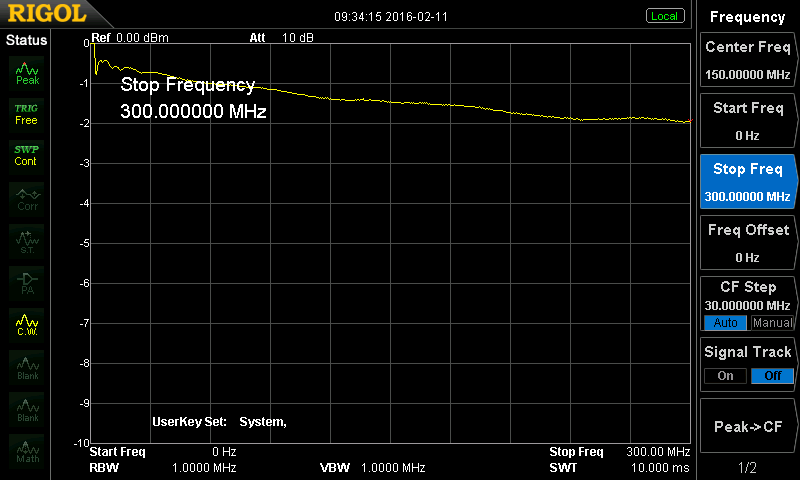
追記:FT82-61 を使ったバージョンに変更しました。
自作 デジタル SWR 計(再) 2 | 方向性結合器の改善編 | tech - 氾濫原
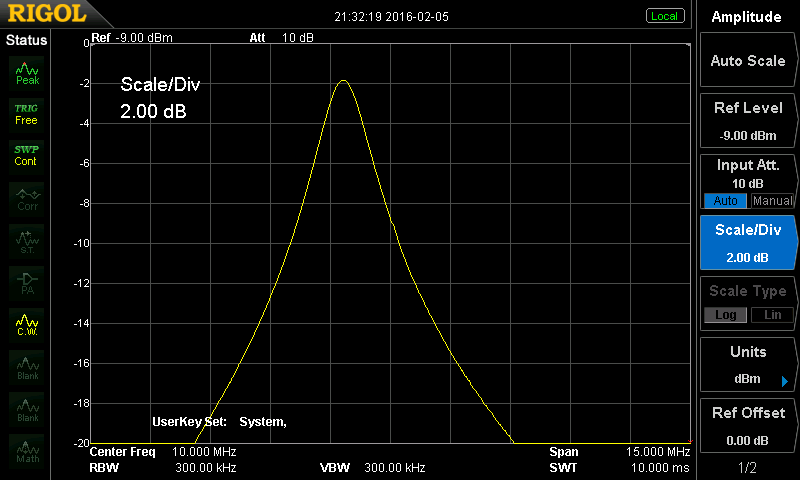
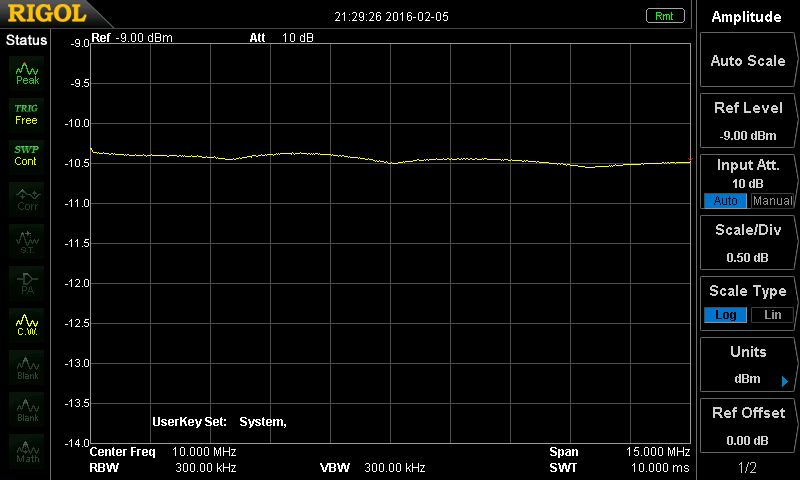
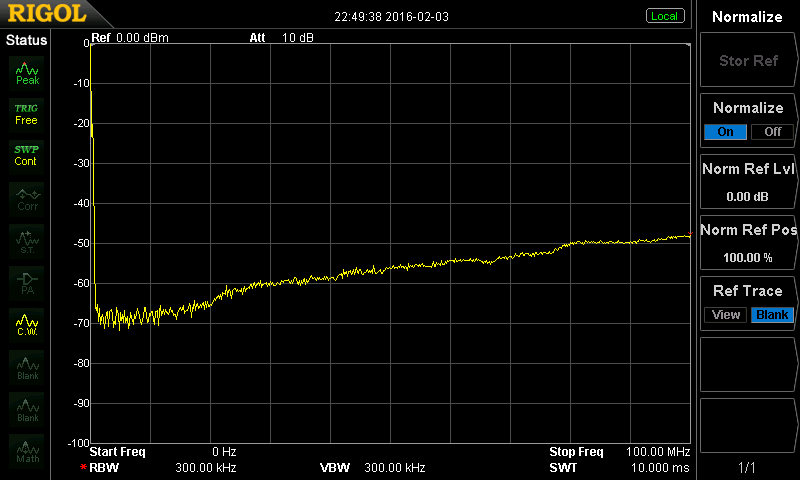
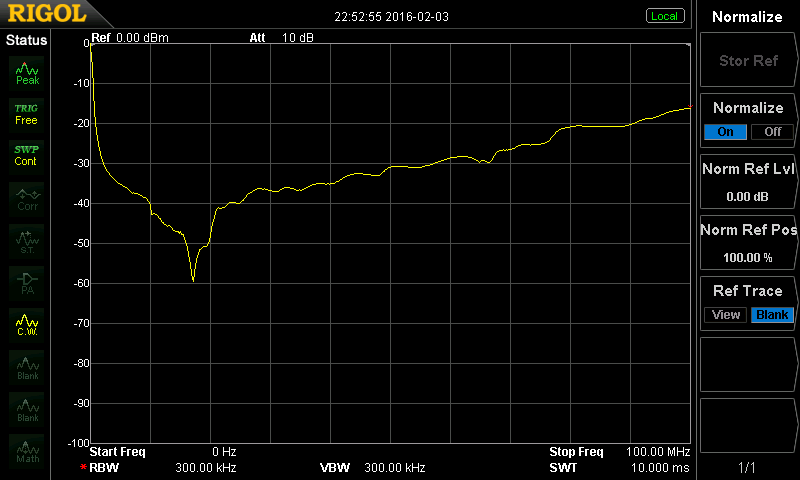
SWR はこんな感じでした
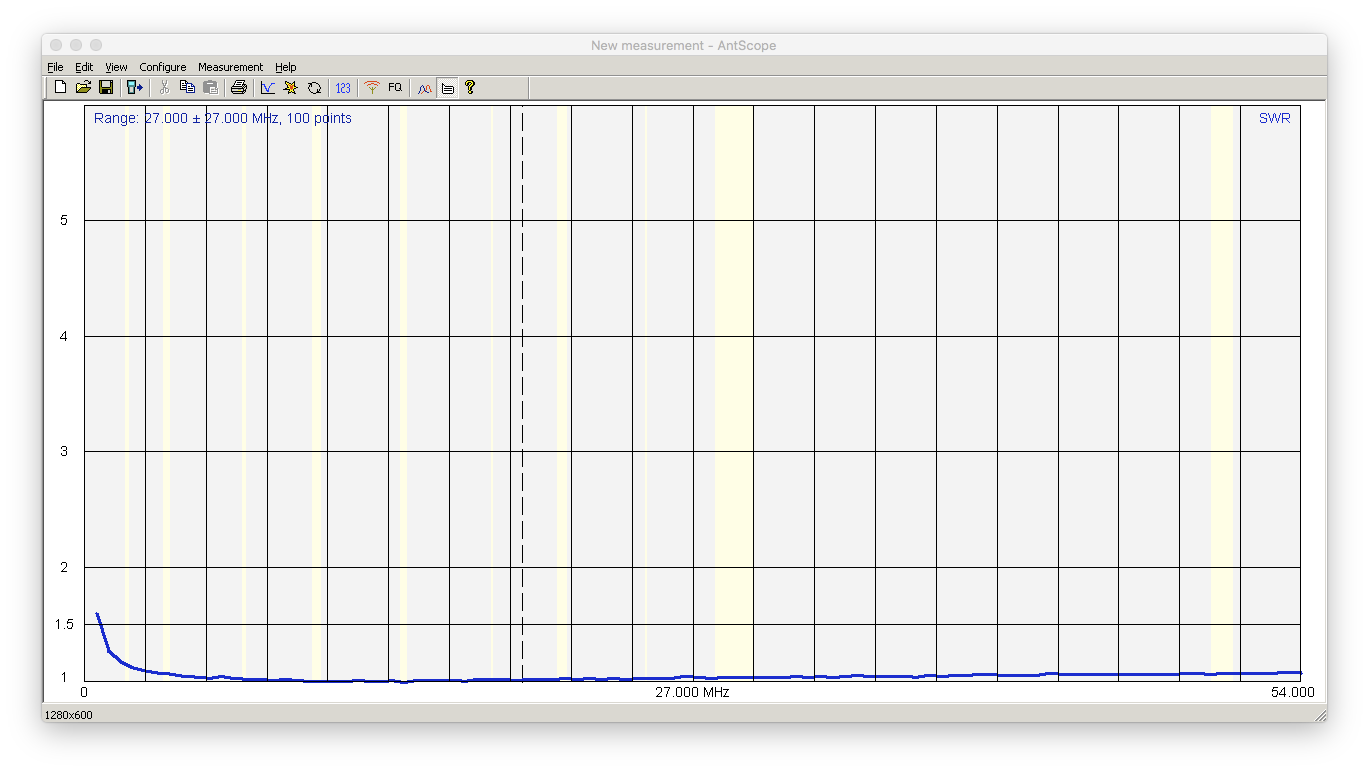
SWR だとよくわからないので、リターンロスでみるとこんな感じです
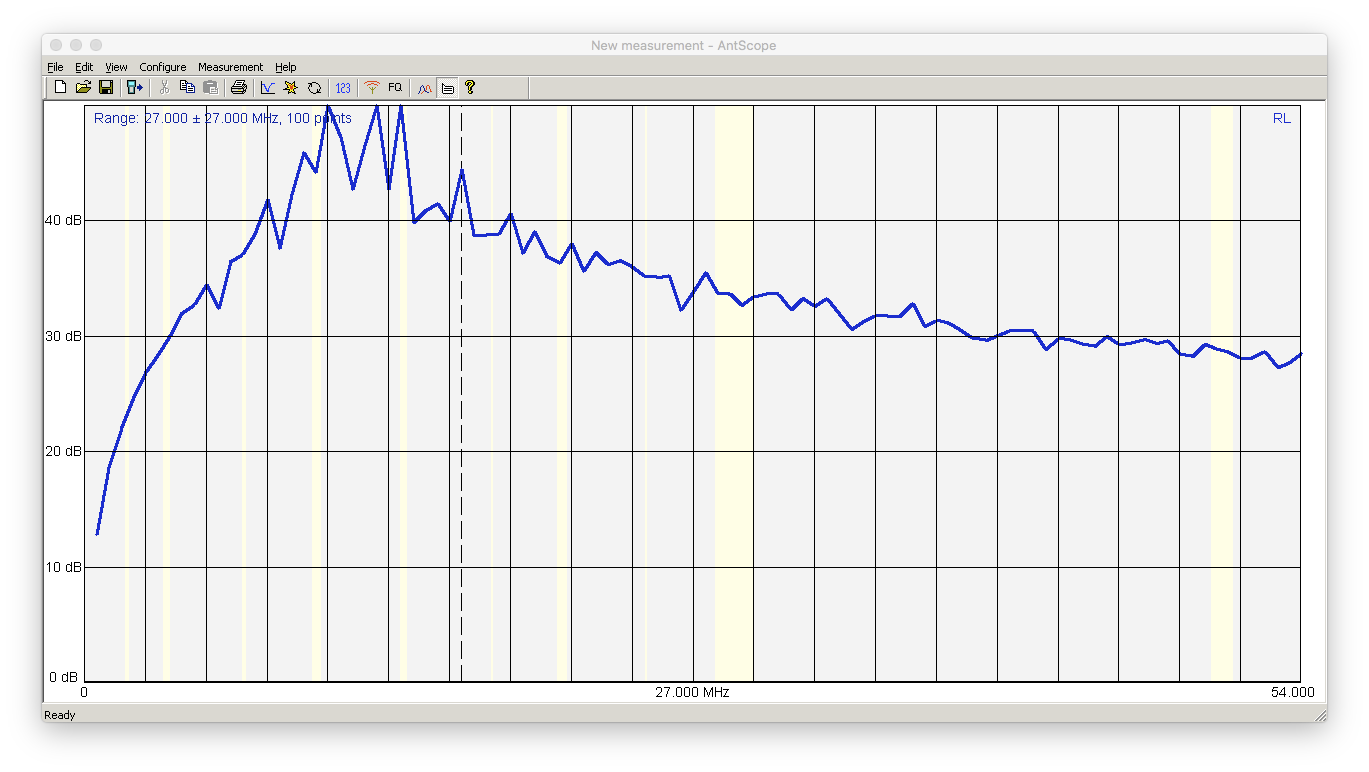
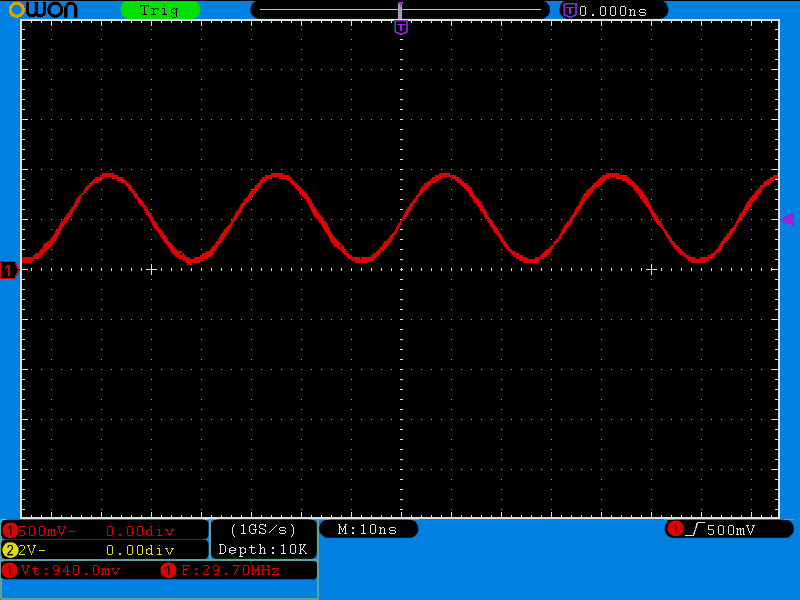
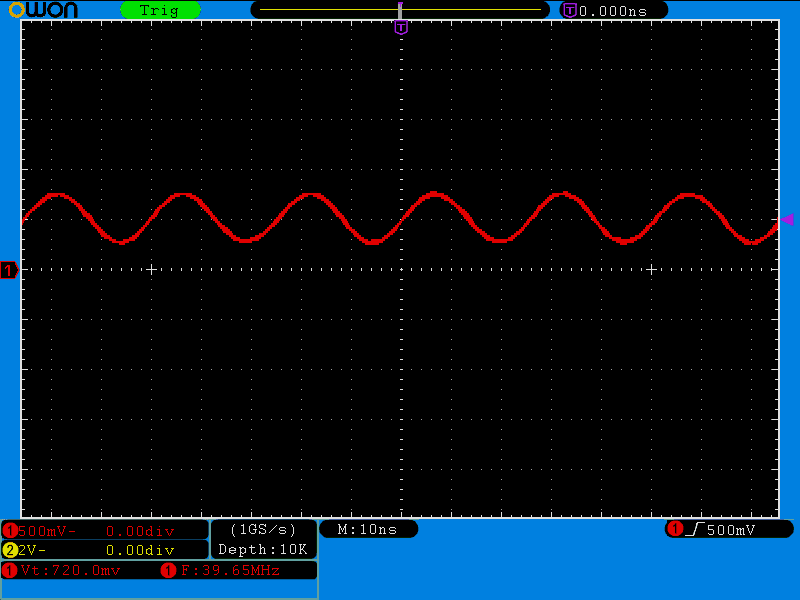
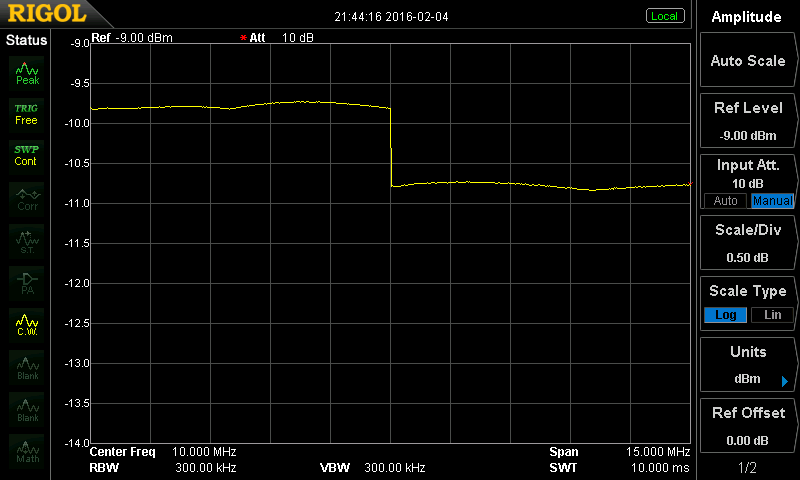
肝心のディレクティビティなどの特性です。蓋をあけた状態で電圧をオシロで計って50Ω換算で出しています。残念ながら前回作ったものよりも良くありません。

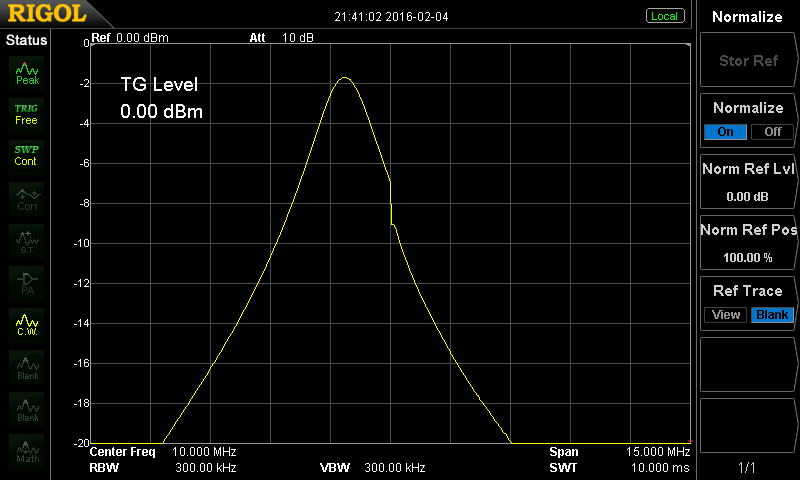
ログアンプの効果
ダイオード検波の場合、微小電力ではダイオードの Vf を超えることができず、それはそのまま誤差になります。
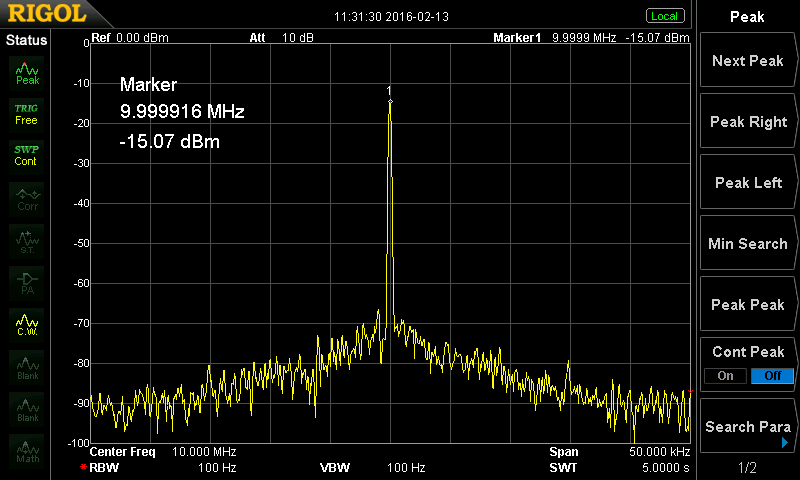
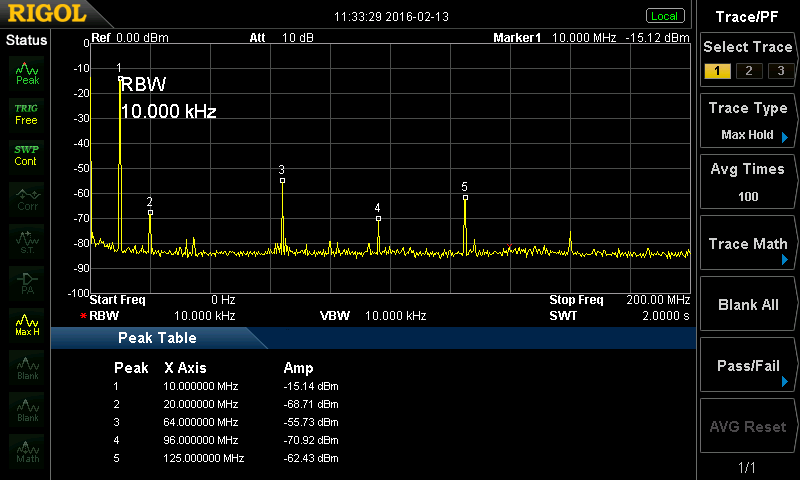
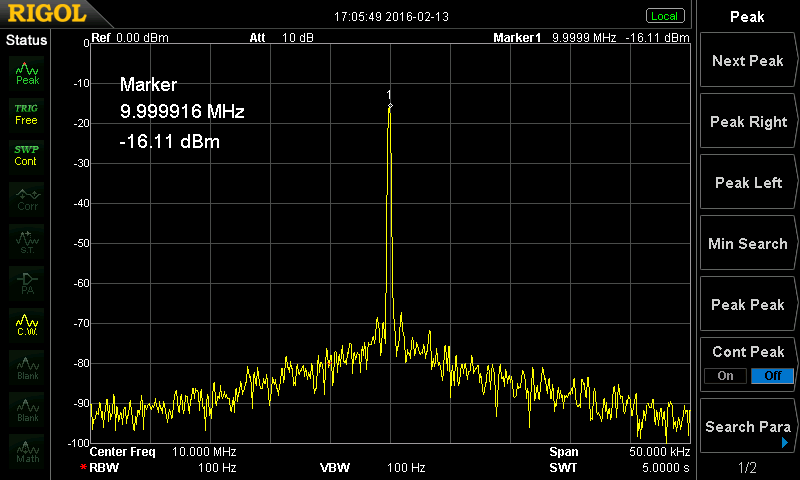
ログアンプ検波することで、ダイオード検波の欠点はなくなり、微小電力から計れるようになりました。具体的には、スペアナのトラッキングジェネレータ出力を 0dBm にして計っても、多少の誤差はありますがちゃんと 1mW ぐらいの値が出てきます。
通常送信機の電力測定ではこんな微小電力まで計れる必要は特にないかと思いますが、SWR 計として反射電力を計りたい場合、SWR が低いときには反射電力も非常に小さくなりますから、ダイナミックレンジの広い測定が必要になります。ダイオード検波と通常のリニアなADCを使うことに対する最大のメリットはここだと思います。
方向性結合器部分はまだ追試が必要
SWR計としてまとめるのではなく、方向性結合器として一旦作って評価をしてから、検波回路を外付けするほうが安定したものが作れそうです。次はそのようにしたいと思います。
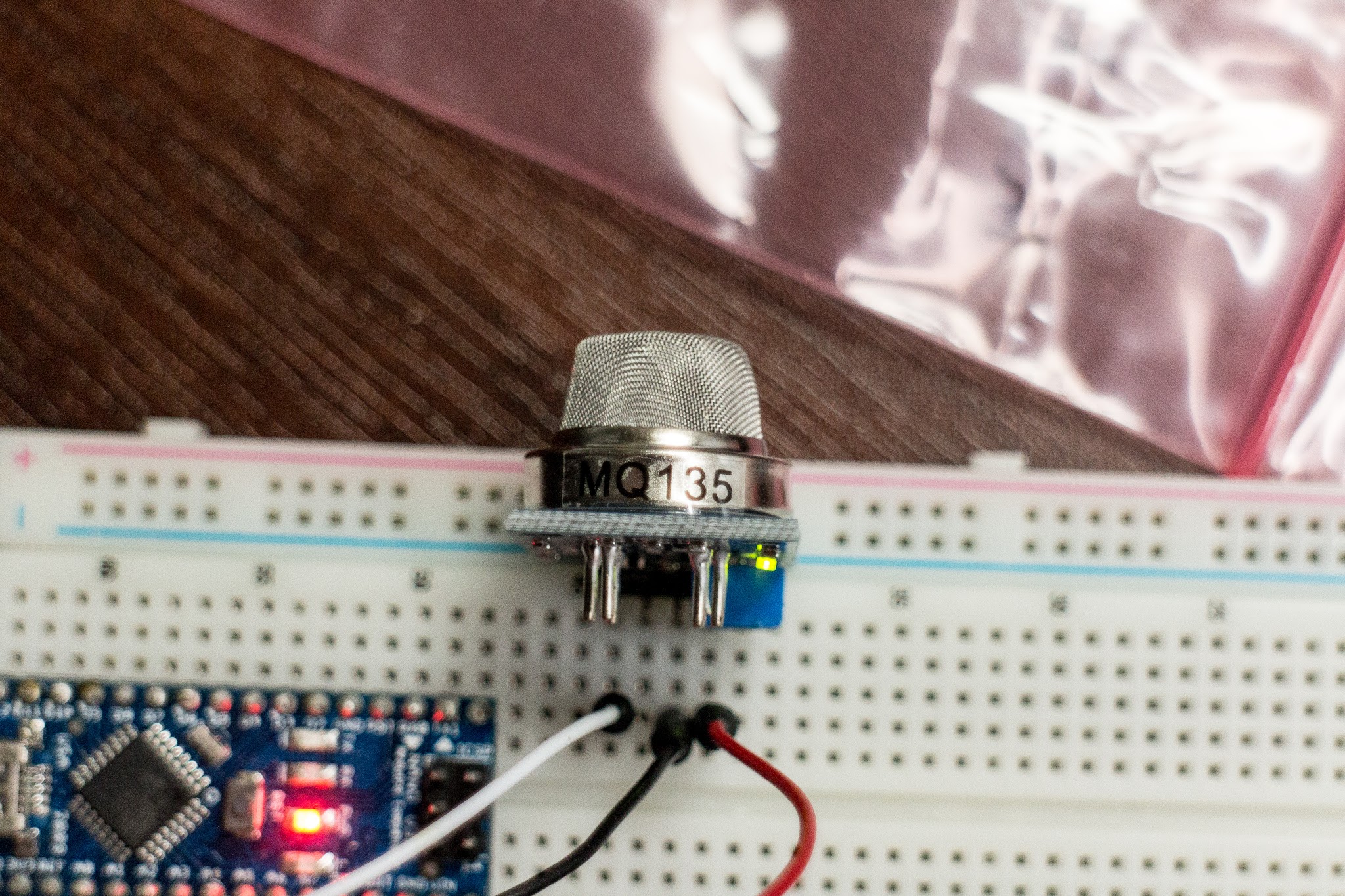
制御
インターフェイスはまともに作っていなくて、Arduino で I2C から値を呼んで計算させてシリアルに出力だけさせてテストしていました。今のところまだ実用にはなっていません。