コード全文
/*#!as --gstabs+ -o blosxasm.o blosxasm.s && ld -o blosxasm -e _start blosxasm.o && objdump -d -j .text -j .data blosxasm && ./blosxasm
*/
.global _start
.macro sys_exit
mov r7, $0x01 /* set system call number to 1 (exit) */
svc $0x00 /* supervisor call */
.endm
.macro sys_read
mov r7, $0x03
svc $0x00 /* supervisor call */
.endm
.macro sys_write
mov r7, $0x04
svc $0x00 /* supervisor call */
.endm
O_RDONLY = 0x0000
.macro sys_open
mov r7, $0x05
svc $0x00 /* supervisor call */
.endm
.macro sys_close
mov r7, $0x06
svc $0x00 /* supervisor call */
.endm
.macro sys_getdents
mov r7, $0x8d
svc $0x00 /* supervisor call */
.endm
.macro sys_stat
mov r7, $0x6a
svc $0x00 /* supervisor call */
.endm
.macro sys_brk
mov r7, $0x2d
svc $0x00 /* supervisor call */
.endm
PROT_NONE = 0x00
PROT_READ = 0x01
PROT_WRITE = 0x02
PROT_EXEC = 0x04
MAP_ANONYMOUS = 0x20
MAP_PRIVATE = 0x02
.macro sys_mmap
mov r7, $0xc0 /* sys_mmap_pgoff */
svc $0x00 /* supervisor call */
.endm
.macro sys_munmap
mov r7, $0x5b
svc $0x00 /* supervisor call */
.endm
.macro sys_mremap
mov r7, $0xa3
svc $0x00 /* supervisor call */
.endm
.section .data
brk: .word 0
config:
var_title:
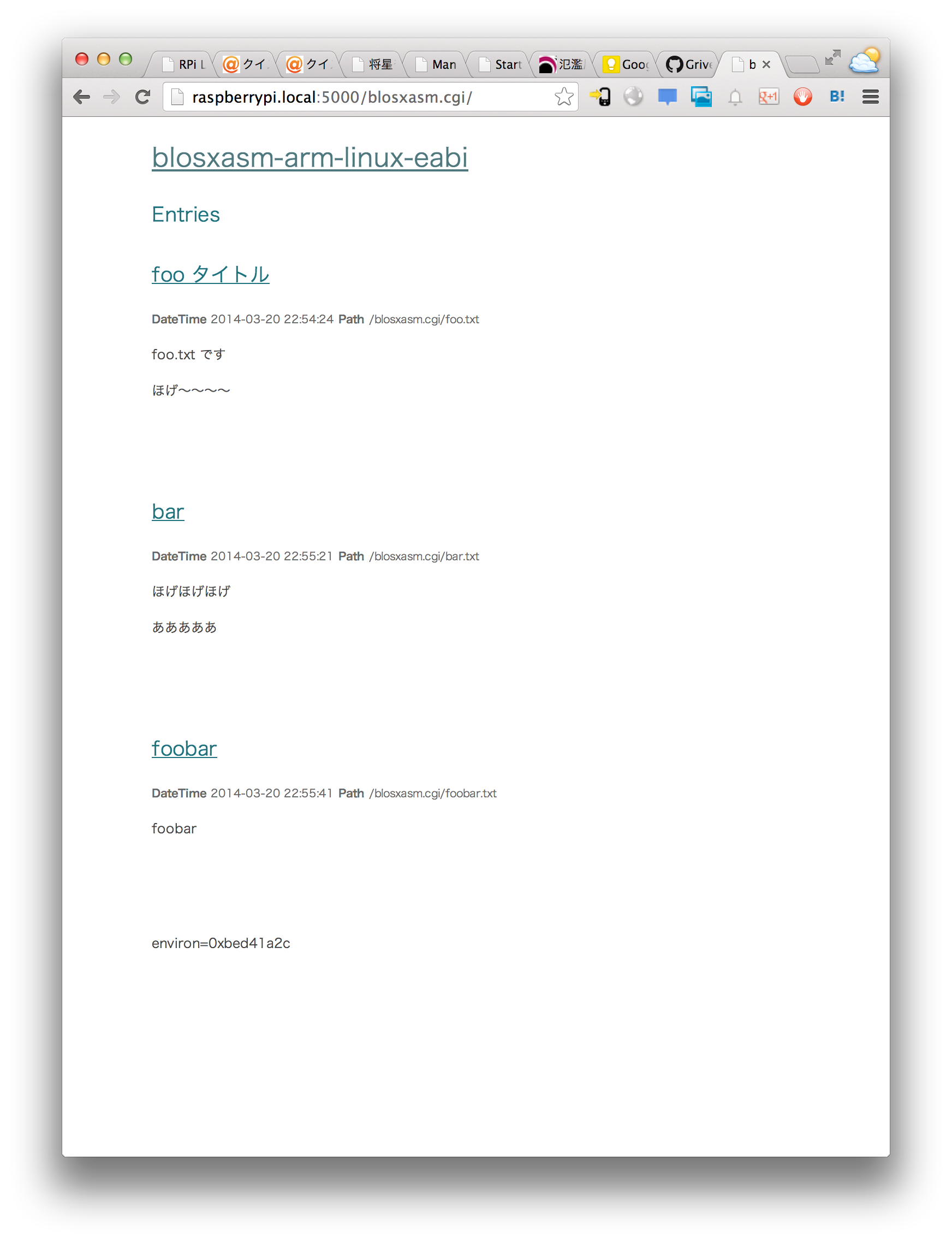
.ascii "blosxasm-arm-linux-eabi"
var_title_len = . - var_title
.align 2
var_home:
.ascii "/blosxasm.cgi/"
var_home_len = . - var_home
.align 2
var_data_dir:
.asciz "data/"
.align 2
var_head_path:
.asciz "head.html"
.align 2
var_story_path:
.asciz "story.html"
.align 2
var_foot_path:
.asciz "foot.html"
.align 2
.section .text
_start:
mov lr, #0
/* r0 = argc (not used) */
ldr r0, [sp]
/* r1 = argv (not used) */
add r1, sp, $0x04
/* r2 = argc * 4 (skip argv) */
mov r3, $0x04
mul r2, r0, r3
/* skip null word */
add r2, r2, $0x04
add r2, r1
/* save char** environ */
ldr r0, =environ
str r2, [r0]
bl main
mov r0, $0xff
sys_exit
main:
adr r0, PATH_INFO
bl getenv
cmp r0, $0x00 /* if env is not set */
adreq r0, PATH_INFO_default
mov v5, r0 /* v5 = PATH_INFO */
bl strlen
cmp r0, $0x00 /* if env is set but empty */
adreq v5, PATH_INFO_default
ldr r0, =var_head_path
bl template
/**
* append entry to brk (like dynamic array)
*/
mov r0, $0x00
bl sbrk
mov v1, r0 /* v1 = first brk */
ldr r0, =var_data_dir
ldr r1, =file_callback
bl dentries
/**
* loop each entry
*/
ldr v2, =entries_count
ldr v2, [v2] /* v2 = entry count */
ldr v3, =current_entry /* v3 = pointer to current entry address */
main_entry_loop:
str v1, [v3]
/* findstr(entry.name, path_info+1, strlen(path_info)-1) */
mov r0, v5
bl strlen
sub r2, r0, #1
add r0, v1, #entry_path
add r1, v5, #1
bl findstr
cmp r0, $0x00
ldreq r0, =var_story_path
bleq template
sub v2, v2, $0x01
cmp v2, $0x00
add v1, v1, #entry_buffer_len
bne main_entry_loop
ldr r0, =var_foot_path
bl template
mov r0, $0x00 /* set exit status to 0 */
ldr r1, =buffer
sys_exit
file_callback:
stmfd sp!, {r1-r3, v1-v5, lr}
mov v1, r0 /* v1 = name */
mov v2, r1 /* v2 = name_len */
/* skip . files */
ldrb r0, [v1]
cmp r0, #'.
bleq 1f
mov r0, v1
bl read_entry
1:
ldmfd sp!, {r1-r3, v1-v5, pc}
USER:
.asciz "USER"
.align 2
PATH_INFO:
.asciz "PATH_INFO"
.align 2
PATH_INFO_default:
.asciz "/"
.align 2
error:
cmp r0, $0x00
moveq r0, $0x01
sys_exit
divmod: /* uint numerator, uint devider -> quo, rem */
stmfd sp!, {v1-v5, lr}
mov v1, r0 /* num */
mov v2, r1 /* div */
mov r0, $0x00 /* quo */
mov r1, $0x00 /* rem */
mov r2, #32 /* i */
1:
sub r2, r2, $0x01
/* rem = rem << 1*/
mov r1, r1, LSL #1
/* num >> i */
mov r3, v1, LSR r2
/* num & 1 */
and r3, r3, #1
/* rem[0] = num[i] */
orr r1, r1, r3
/* rem >= div */
cmp r1, v2
subge r1, r1, v2
movge r3, #1
orrge r0, r0, r3, LSL r2
cmp r2, $0x00
bne 1b
ldmfd sp!, {v1-v5, pc}
base10: /* int numerator, char* buffer -> int length */
stmfd sp!, {v1-v5, lr}
mov v1, r1
mov v2, $0x00 /* length */
1:
mov r1, #10
bl divmod
push {r1} /* for getting digit from top */
add v2, v2, $0x01
cmp r0, $0x00
bne 1b
mov r2, v2
2:
sub r2, r2, $0x01
pop {r0}
add r0, r0, $0x30
strb r0, [v1], $0x01
cmp r2, $0x00
bne 2b
mov r0, $0x00
strb r0, [v1]
mov r0, v2
ldmfd sp!, {v1-v5, pc}
base16: /* int numerator, char* buffer -> int length */
stmfd sp!, {v1-v5, lr}
mov v1, r1
mov v2, $0x00 /* length */
1:
and r1, r0, $0x0f
cmp r1, $0x09
addle r1, r1, $0x30
addgt r1, r1, $0x57
push {r1}
add v2, v2, $0x01
mov r0, r0, LSR #4
cmp r0, $0x00
bne 1b
mov r2, v2
2:
sub r2, r2, $0x01
pop {r0}
strb r0, [v1], $0x01
cmp r2, $0x00
bne 2b
mov r0, $0x00
strb r0, [v1]
mov r0, v2
ldmfd sp!, {v1-v5, pc}
strncmp: /* char* s1, char* s2, size_t len -> 1|0 */
stmfd sp!, {v1-v5, lr}
mov r3, $0x00 /* result */
1: cmp r2, $0x00
beq 2f /* if (r2 == 0) goto 2 */
sub r2, r2, $0x01 /* len-- */
ldrb r4, [r0], $0x01
ldrb r5, [r1], $0x01
cmp r4, r5
addne r3, $0x01
beq 1b
2:
mov r0, r3
ldmfd sp!, {v1-v5, pc}
strlen: /* char* str -> uint */
stmfd sp!, {r1-r2, lr}
mov r1, $0x00
/* r2 = *str++ (ldrb = load byte, and r0 increment after) */
1: ldrb r2, [r0], $0x01
cmp r2, $0x00
addne r1, r1, $0x01 /* if (r2 != 0) r1++ */
bne 1b /* if (r2 != 0) goto 1; */
mov r0, r1
ldmfd sp!, {r1-r2, pc}
strcpy: /* char* dest, char* src -> dest */
stmfd sp!, {r0-r2, lr}
1:
ldrb r2, [r1], $0x01
strb r2, [r0], $0x01
cmp r2, $0x00
bne 1b
ldmfd sp!, {r0-r2, pc}
strcat: /* char* dest, char* src -> dest */
stmfd sp!, {r0-r2, v1-v5, lr}
1:
ldrb r2, [r0], $0x01
cmp r2, $0x00
bne 1b
sub r0, r0, $0x01
2:
ldrb r2, [r1], $0x01
strb r2, [r0], $0x01
cmp r2, $0x00
bne 2b
ldmfd sp!, {r0-r2, v1-v5, pc}
findstr: /* char* str, char* search, int len_of_search -> uint */
stmfd sp!, {v1-v5, lr}
mov v1, r0
mov v2, r1
mov v3, r2
mov v4, v1 /* save original address */
cmp v3, $0x00
moveq r0, $0x00
ldmeqfd sp!, {v1-v5, pc}
1:
ldrb r0, [v1]
cmp r0, $0x00
beq 2f
mov r0, v1
mov r1, v2
mov r2, v3
bl strncmp
cmp r0, $0x00
addne v1, $0x01
bne 1b
sub r0, v1, v4
ldmfd sp!, {v1-v5, pc}
2:
mov r0, #-1
ldmfd sp!, {v1-v5, pc}
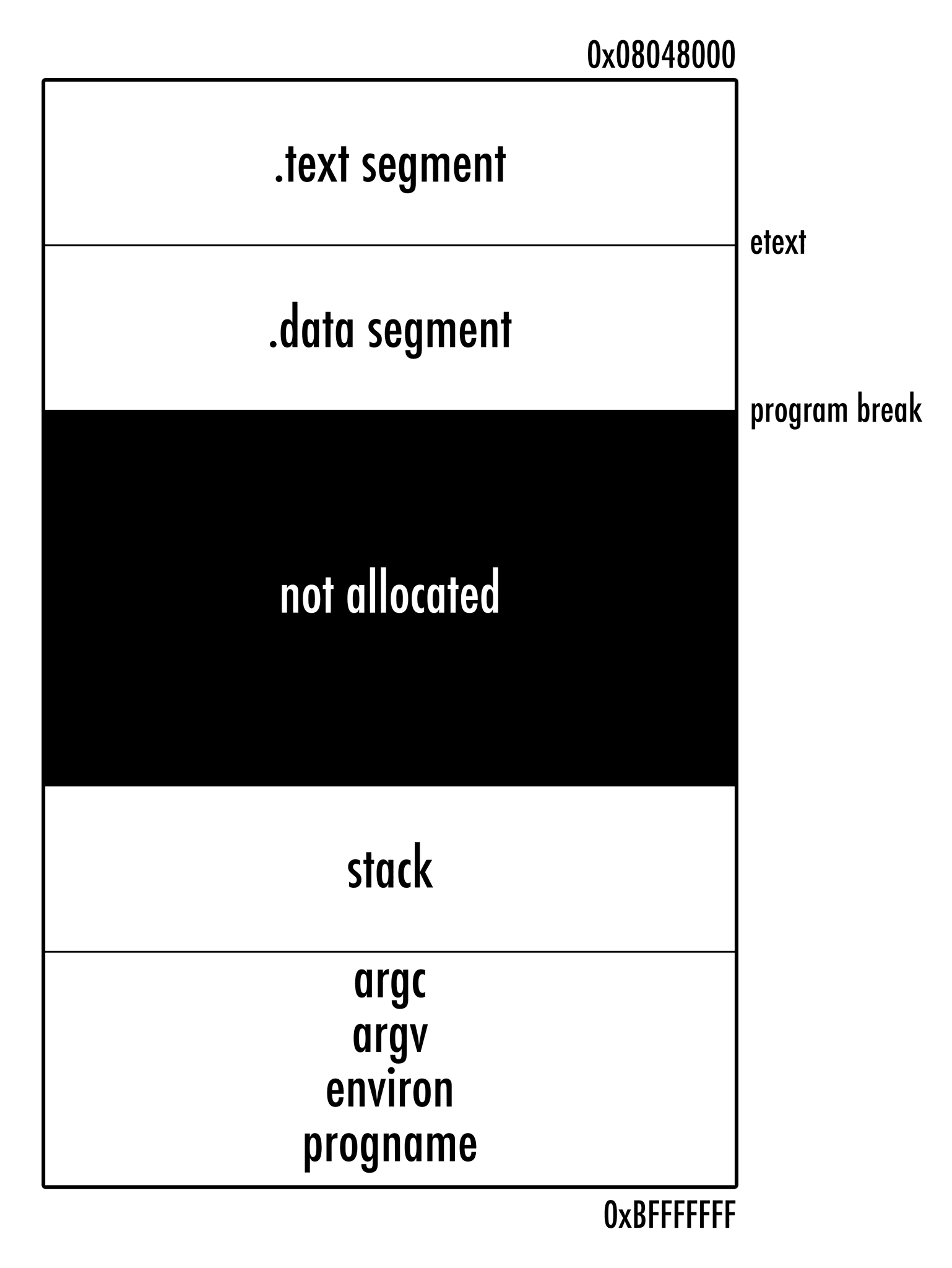
sbrk: /* uint size -> void* */
push {lr}
ldr r3, =brk /* r3 = prev_brk */
ldr r1, [r3]
cmp r1, $0x00 /* if prev_brk == 0 */
bleq sbrk_init
add r0, r0, r1
sys_brk
cmp r0, r1
blt sbrk_nomem /* curr_brk == prev_brk */
str r0, [r3] /* update heap_start */
mov r0, r1
pop {pc}
sbrk_init:
push {r0}
mov r0, $0x00
sys_brk
mov r1, r0
pop {r0}
mov pc, lr
sbrk_nomem:
mov r0, $0x00
pop {pc}
getenv: /* char* name -> char* */
stmfd sp!, {v1-v5, lr}
/* v1 = name */
mov v1, r0
/* v2 = strlen(r0) */
bl strlen
mov v2, r0
/* v3 = environ char** */
ldr v3, =environ
ldr v3, [v3]
1: /* if (strncmp(name, *environ, len) == 0) { */
mov r0, v1
ldr r1, [v3]
mov r2, v2
bl strncmp
cmp r0, $0x00
/* if (*environ)[len] == '=') { */
ldreq r0, [v3]
ldreqb r0, [r0, v2]
cmpeq r0, #'=
beq 2f
/* } */
/* environ++ */
add v3, $0x04
/* *environ != NULL */
ldr r1, [v3]
cmp r1, $0x00
bne 1b
/* not found return NULL */
mov r0, $0x00
ldmfd sp!, {v1-v5, pc}
2: /* found and return address */
ldreq r0, [v3]
add r0, r0, v2
add r0, r0, $0x01 /* skip '=' */
ldmfd sp!, {v1-v5, pc}
dentries: /* char* path, (void)(callback(name, name_len)) */
stmfd sp!, {r1-r3, v1-v5, lr}
mov ip, r1
/* open */
mov r1, #O_RDONLY
sys_open
cmp r0, $0x00
rsble r0, r0, #0
blle error
mov v1, r0
1:
/* getdents */
mov r0, v1
ldr r1, =dentry_buffer
mov r2, #dentry_buffer_len
sys_getdents
cmp r0, $0x00
beq 2f
mov v2, r0 /* read bytes */
rsblt r0, r0, #0
bllt error
ldr v3, =dentry_buffer
3:
ldrh v5, [v3, #8] /* linux_dirent d_reclen */
add r0, v3, #10
mov r1, v5
sub r1, r1, #12
blx ip /* callback */
sub v2, v2, v5 /* len -= d_reclen */
add v3, v3, v5 /* buffer += d_reclen */
cmp v2, $0x00
bne 3b
b 1b
2:
/* close */
mov r0, v1
sys_close
ldmfd sp!, {r1-r3, v1-v5, pc}
read_stat: /* char* name */
stmfd sp!, {r0-r3, v1-v5, lr}
ldr r1, =stat_buffer
sys_stat
cmp r0, $0x00
rsblt r0, r0, #0
bllt error
ldmfd sp!, {r0-r3, v1-v5, pc}
read_entry: /* char* name, int name_len */
stmfd sp!, {r1-r3, v1-v5, lr}
mov v1, r0
/* expand heap */
mov r0, #entry_buffer_len
bl sbrk
mov v3, r0 /* v3 = entry_address */
/* copy path */
add r0, v3, #entry_path
mov r1, v1
bl strcpy
/* r0 = ["data/" + name] */
ldr r0, =buffer
ldr r1, =var_data_dir
bl strcpy
mov r1, v1
bl strcat
mov v1, r0 /* v1 = path adr */
mov r0, v1
bl read_stat
/* copy mtime */
ldr r0, =st_mtime
ldr r0, [r0]
str r0, [v3, #entry_mtime]
ldr v2, =st_size
ldr v2, [v2] /* v2 = file size */
push {r4, r5}
/* mmap for file contents */
mov r0, #0
mov r1, v2
mov r2, #PROT_READ
orr r2, r2, #PROT_WRITE
mov r3, #MAP_ANONYMOUS
orr r3, r3, #MAP_PRIVATE
mov r4, #-1
mov r5, #0
sys_mmap
cmn r0, #4096
rsbhs r0, r0, #0
blhs error
mov r3, r0 /* r3 = mmapped address */
pop {r4, r5}
str r3, [v3, #entry_title]
/* open */
mov r0, v1
mov r1, #O_RDONLY
sys_open
cmp r0, $0x00
rsble r0, r0, #0
blle error
mov v5, r0 /* v5 = fd */
/* read */
1:
mov r0, v5
mov r1, r3
mov r2, #4096
sys_read
cmp r0, $0x00
rsblt r0, r0, #0
bllt error
add r1, r0
bne 1b
/* close */
mov r0, v5
sys_close
/* find first \n */
mov r0, r3
2:
ldrb r1, [r0], $0x01
cmp r1, $0x0a
cmpne r1, $0x00
bne 2b
/* replace first \n to \0 to splitting title and body */
mov r1, $0x00
strb r1, [r0, #-1]
str r0, [v3, #entry_body]
ldr r0, =entries_count
ldr r1, [r0]
add r1, r1, $0x01
str r1, [r0]
ldmfd sp!, {r1-r3, v1-v5, pc}
template: /* char* name */
stmfd sp!, {r0-r3, v1-v5, lr}
/* open() */
mov r1, #O_RDONLY
sys_open
cmp r0, $0x00
beq error
mov v1, r0 /* v1 = fd */
ldr v2, =buffer /* v2 = buffer */
mov r1, v2
mov r2, #4096
sys_read
mov v3, r0 /* v3 = length */
mov r0, $0x00
strb r0, [v2, v3] /* null terminate */
1:
mov r0, v2
adr r1, open_variable
mov r2, #open_variable_len
bl findstr
/* check found */
cmp r0, #-1
beq 2f
/* output prev chars */
mov r2, r0 /* set output length */
mov r0, $0x01
mov r1, v2
sys_write
/* increment buffer */
add v2, v2, r2
add v2, v2, #open_variable_len
/* find close */
mov r0, v2
adr r1, close_variable
mov r2, #close_variable_len
bl findstr
/* check found */
cmp r0, #-1
beq 2f
mov v5, r0 /* variable name length */
/* replaces */
/* replace title */
mov r0, v2
adr r1, variable_name_blogtitle
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_blogtitle
beq 3f
/* replace home */
mov r0, v2
adr r1, variable_name_home
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_home
beq 3f
/* replace path */
mov r0, v2
adr r1, variable_name_path
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_path
beq 3f
/* replace title */
mov r0, v2
adr r1, variable_name_title
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_title
beq 3f
/* replace body */
mov r0, v2
adr r1, variable_name_body
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_body
beq 3f
/* replace time */
mov r0, v2
adr r1, variable_name_time
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_time
beq 3f
/* replace environ */
mov r0, v2
adr r1, variable_name_environ
mov r2, v5
bl strncmp
cmp r0, $0x00
bleq variable_environ
beq 3f
3:
/* increment buffer */
add v2, v2, v5
add v2, v2, #close_variable_len
ldrb r0, [v2]
cmp r0, $0x00
bne 1b
2:
/* output rest */
ldr r2, =buffer
sub r2, v2, r2
sub r2, v3, r2
mov r0, $0x01
mov r1, v2
sys_write
/* close() */
mov r0, v1
sys_close
ldmfd sp!, {r0-r3, v1-v5, pc}
open_variable:
.ascii "#{"
open_variable_len = . - open_variable
.align 2
close_variable:
.ascii "}"
close_variable_len = . - close_variable
.align 2
variable_name_blogtitle:
.asciz "blogtitle"
.align 2
variable_name_home:
.asciz "home"
.align 2
variable_name_title:
.asciz "title"
.align 2
variable_name_body:
.asciz "body"
.align 2
variable_name_path:
.asciz "path"
.align 2
variable_name_time:
.asciz "time"
.align 2
variable_name_environ:
.asciz "environ"
.align 2
variable_blogtitle:
stmfd sp!, {r0-r3, lr}
mov r0, $0x01
ldr r1, =var_title
mov r2, #var_title_len
sys_write
ldmfd sp!, {r0-r3, pc}
variable_home:
stmfd sp!, {r0-r3, lr}
mov r0, $0x01
ldr r1, =var_home
mov r2, #var_home_len
sys_write
ldmfd sp!, {r0-r3, pc}
variable_path:
stmfd sp!, {r0-r3, v1-v5, lr}
ldr r0, =current_entry
ldr r0, [r0]
add r1, r0, #entry_path
bl strlen
mov r2, r0
mov r0, $0x01
sys_write
ldmfd sp!, {r0-r3, v1-v5, pc}
variable_title:
stmfd sp!, {r0-r3, v1-v5, lr}
ldr r0, =current_entry
ldr r0, [r0]
add r0, r0, #entry_title
ldr r0, [r0]
mov r1, r0
bl strlen
mov r2, r0
mov r0, $0x01
sys_write
ldmfd sp!, {r0-r3, v1-v5, pc}
variable_body:
stmfd sp!, {r0-r3, v1-v5, lr}
ldr r0, =current_entry
ldr r0, [r0]
add r0, r0, #entry_body
ldr r0, [r0]
mov r1, r0
bl strlen
mov r2, r0
mov r0, $0x01
sys_write
ldmfd sp!, {r0-r3, v1-v5, pc}
variable_time:
stmfd sp!, {r0-r3, v1-v5, lr}
ldr r0, =current_entry
ldr r0, [r0]
add r0, r0, #entry_mtime
ldr r0, [r0]
ldr r1, =buffer
bl base10
mov r2, r0
mov r0, $0x01
ldr r1, =buffer
sys_write
ldmfd sp!, {r0-r3, v1-v5, pc}
variable_environ:
stmfd sp!, {r0-r3, v1-v5, lr}
ldr r0, =environ
ldr r0, [r0]
ldr r1, =buffer
bl base16
mov r2, r0
mov r0, $0x01
ldr r1, =buffer
sys_write
ldmfd sp!, {r0-r3, v1-v5, pc}
.section .bss
.align 2
environ: .word 0
buffer: .skip 4096
dentry_buffer:
.skip 4096
dentry_buffer_len = . - dentry_buffer
stat_buffer: /* /usr/include/arm-linux-gnueabihf/asm/stat.h */
st_dev: .skip 4
st_ino: .skip 4
st_mode: .skip 2
st_nlink: .skip 2
st_uid: .skip 2
st_gid: .skip 2
st_rdev: .skip 4
st_size: .skip 4
st_blksize: .skip 4
st_blocks: .skip 4
st_atime: .skip 4
st_atime_nsec: .skip 4
st_mtime: .skip 4
st_mtime_nsec: .skip 4
st_ctime: .skip 4
st_ctime_nsec: .skip 4
.skip 4
.skip 4
.align 2
stat_buffer_len = . - stat_buffer
entry_buffer: /* not used: just calculate offsets */
entry_buffer_path: .skip 256
entry_buffer_mtime: .skip 4
entry_buffer_title: .skip 4
entry_buffer_body: .skip 4
.align 2
entry_buffer_len = . - entry_buffer
entry_path = entry_buffer_path - entry_buffer
entry_mtime = entry_buffer_mtime - entry_buffer
entry_title = entry_buffer_title - entry_buffer
entry_body = entry_buffer_body - entry_buffer
entries_count: .word 0
current_entry: .word 0