自作キーボードの製作 — コンセンプトとキーレイアウトおよび技術仕様編
500 Can't connect to lowreal.net:443 (certificate verify failed)
まず思いつく現状の不満とかを考えて、それを盛りこんで作ろう、という方針を決めた。つまり
- 左右分割にしたいなあ
- UNIX 配列準拠がいいなあ
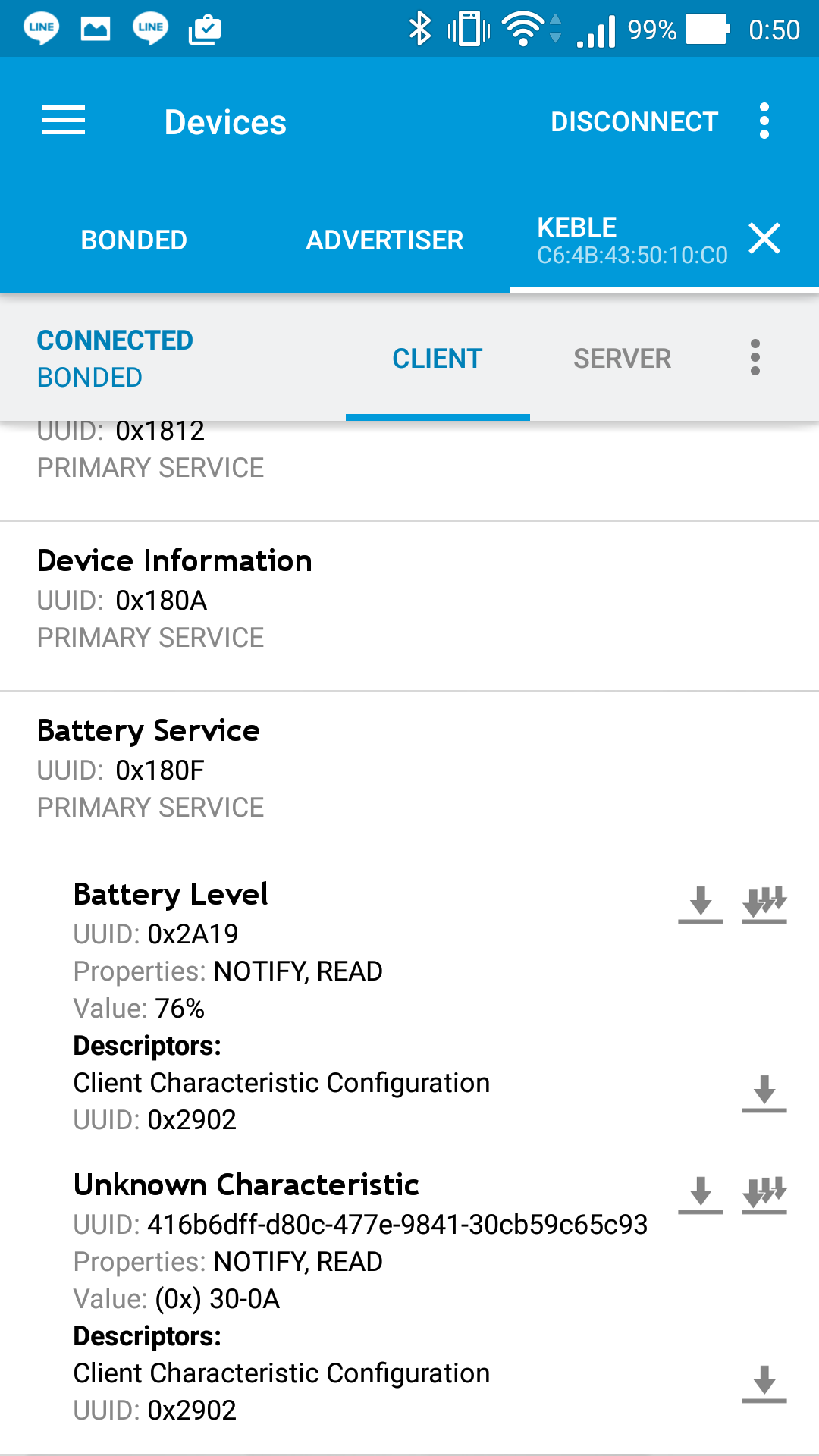
- Bluetooth がいいなあ
あたりが最初の方針になる。
できるだけ MacBook 標準のキーボードでも十分開発できるぐらいの状態を保ちたいので、奇抜なキー配置のものは例え身体に良くても精神に悪いので使いたくない。
市販品で近いものを探すと、Kinesis freestyle2 あたりがイメージに近い。これをキーリマッパでカスタマイズすれば実用的にはいいかもなとは思った。
あと、普通の(普通ってなんだ?)左右分割キーボードの内側のキーにも不満がある。左右分離の場合、タッチタイピングで左手に所属するキーを右手では決して打てなくなる。
しかしゆるふわタッチタイパー的には、中央付近のキーは右手でも左手でも打ちたい。つまりキーをオーバーラップさせたいが、そんなキーボードはこの世に存在していない。僕は「タッチタイピングの矯正」とか別にしたくなくて、ゆるふわでいきたい。
ErgoDox の設計の分析
まずErgoDox はキー数が少なくて UNIX 準拠にはできない。キー配列の画像を見ればわかると思うが、右側にキーが足りない。例えば HHKB なら P の右には [ と ] と DELETE があり3つのキーが続くが、ErgoDox だと1つしかキーがないので無理。ソフトウェア的になんとかするしかない。
なお ErgoDox は設計段階で左右の基板が共通となっている。両面基板をリバーシブルに使うことで両手に対応させている。これにより基板の製造コストはかなり減る (特に小ロットで外注する場合は半額にできる)。ただし、設計には左右対象であるという制約がつく。
一般的なキーボードは右手担当のキーが多く、左右非対称になっている。左右対象という制約をつけると、一般的なキーボードからかなり離れることになる。これはエルゴノミクス的には正しい気はするがよくわからない。ただ、キーが少ないのは現実的に不便だと思う。
余談だけど、右側のキーが多いことも考えると世の中のキーボードは右利き用ではないかと思った。左利きはキーボードにおいても不利を強いられていないだろうか? (僕は右利きなのでそんなこと思いもよらなかったんだけど)
仕様
そういったことを踏まえて自作するキーボードの以下のように仕様とした。
キー配列の仕様
- UNIX キーボードを2分割した形を基本にする。つまり HHKB とほぼ同じで、Ctrl キーはAの左、ESC は 1 の左など。
- 矢印キーはどうしても欲しい (HHKB への大きな不満のひとつ)
- F1〜F12キーもできれば欲しい (HHKBへの小さな不満のひとつ)
- 中央のキーを1列分オーバーラップさせる
レイアウトの詳細
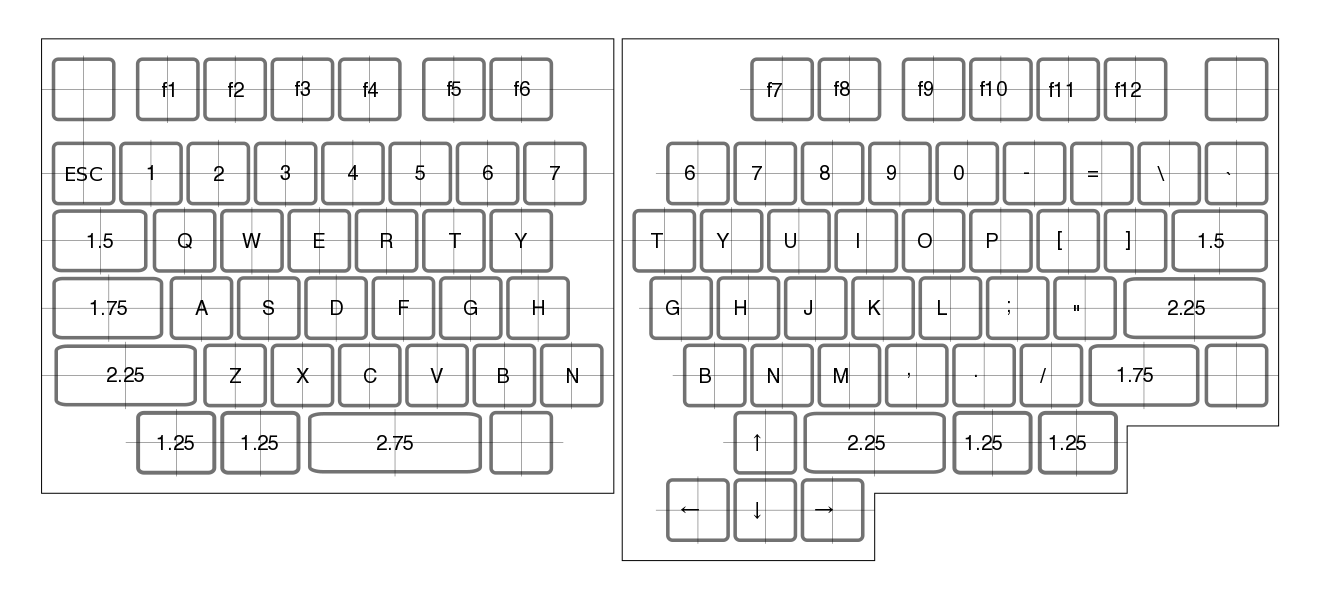
HHKB からの変更点
- スペースキーが2分割に
- F1〜F6, F7〜F12 キーの新設
- 矢印キーの新設
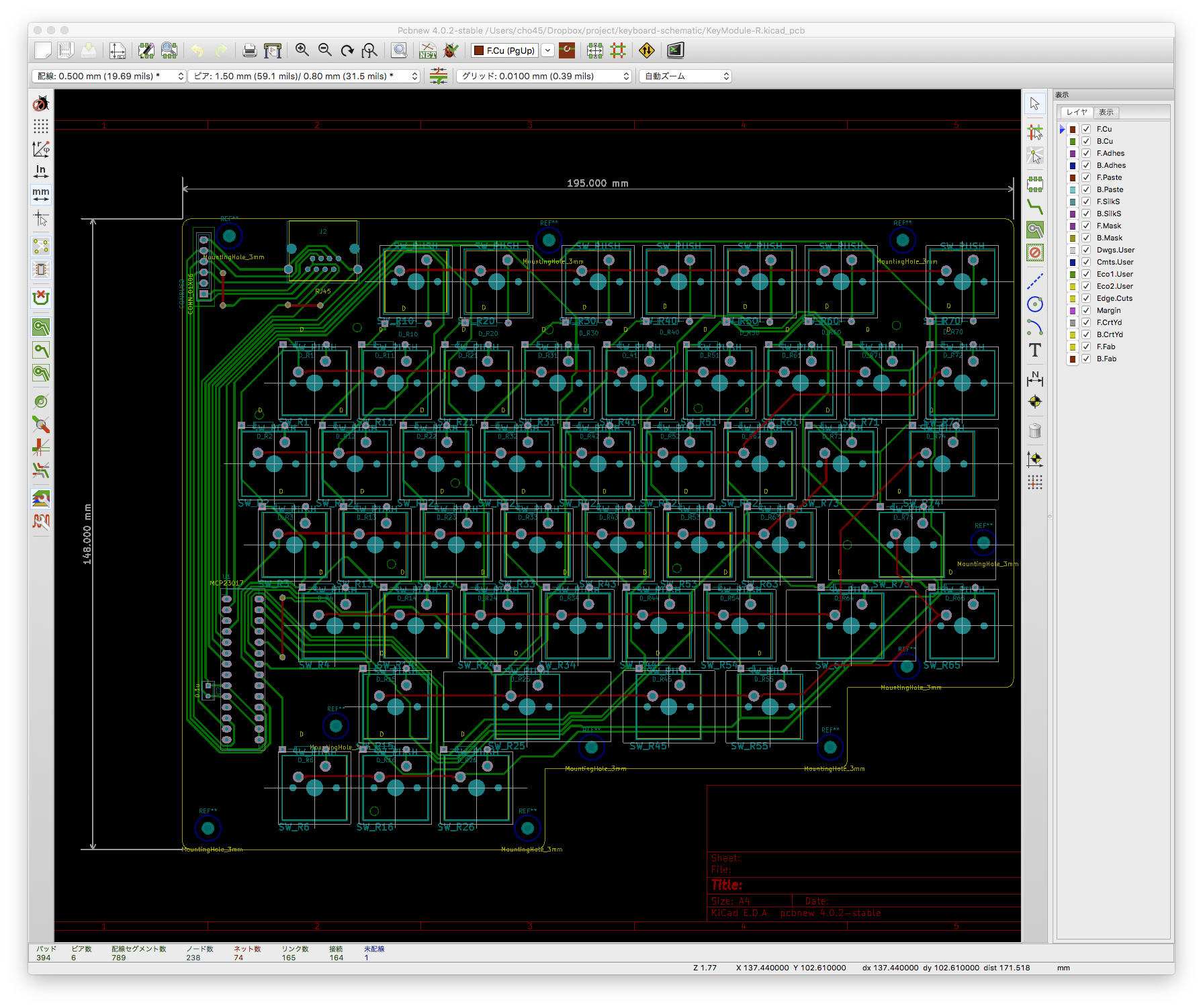
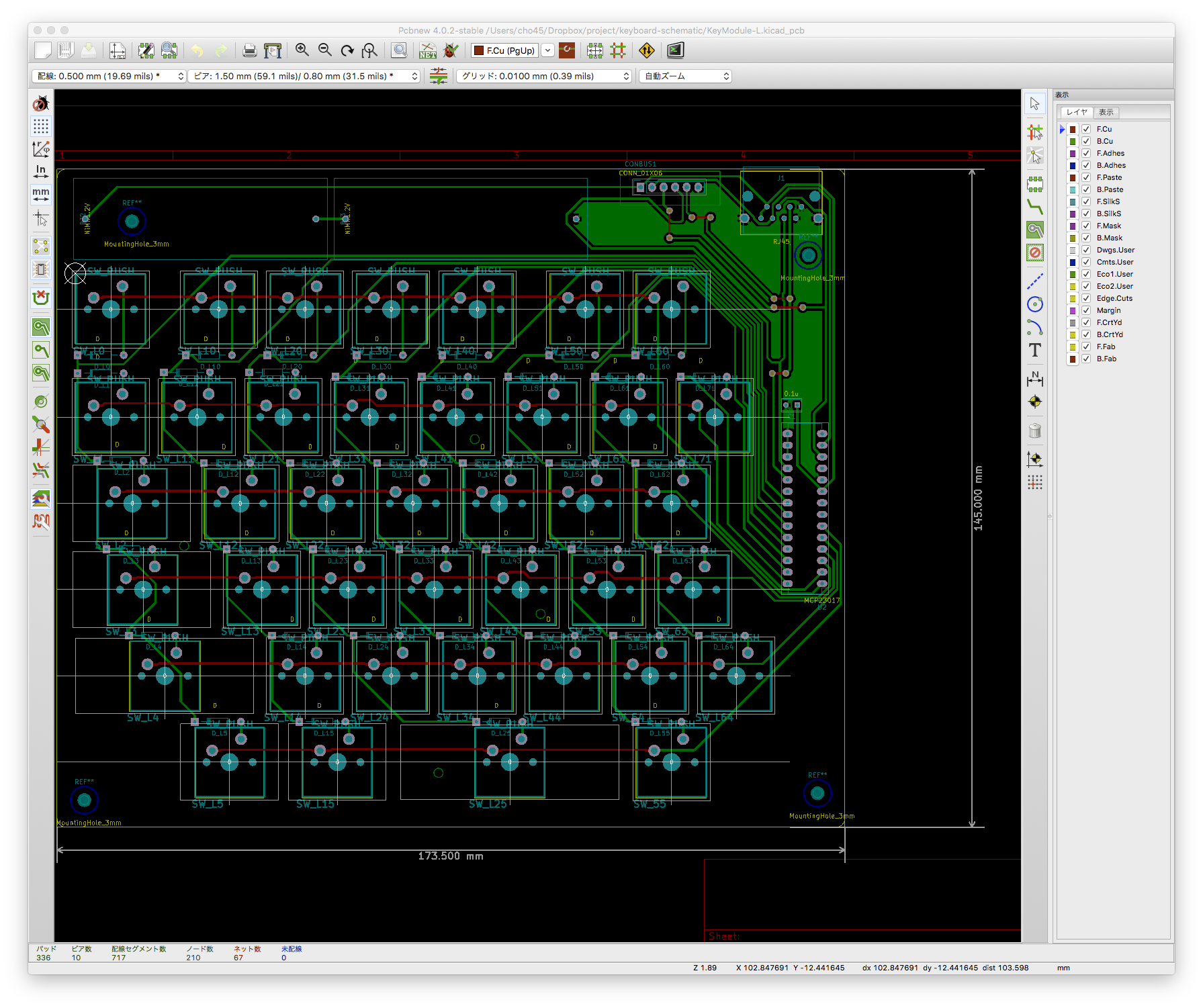
まず「ぼくのかんがえたさいきょうのキーボードはいれつ」を Inkscape で書いてレイアウトを検証した。軽く書くというよりは CAD 的にちゃんと書いた。のちのち Inkscape からエクスポートして KiCAD で読みたかったため。
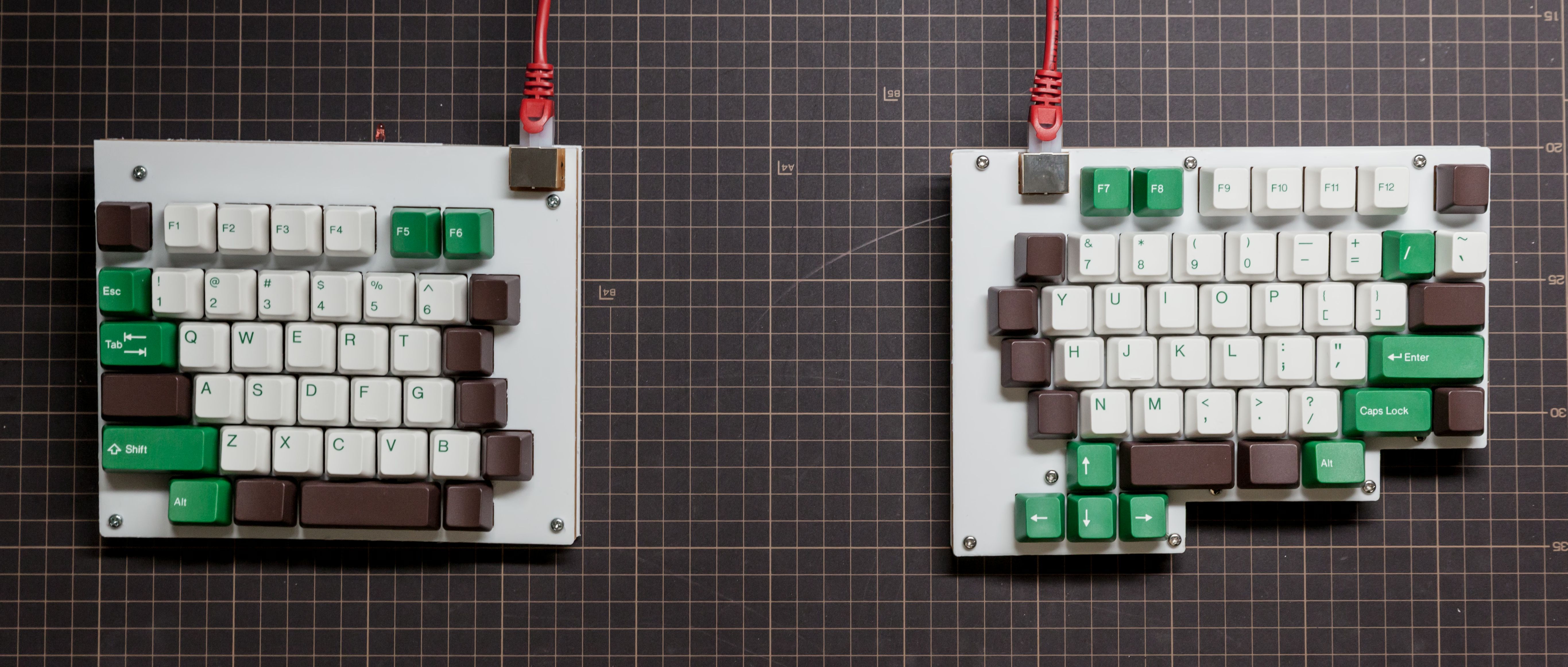
備考
- 僕は右手のスペースキーをほぼ全く使わないので、実質飾りである。
- Caps Lock キー? そんなものはない。写真にある Caps Lock は Shift キー(キーが足りなかったので)
- 矢印キーを置くところがなくて右手親指付近に置いている (が、これはちょっと邪魔だった。あと1キー分左にずれていたほうがいい…)
技術仕様
同時に、いくつかこうしたいという仕様も決めた
- NiMH 単3バッテリー2本で半年ぐらい持つ (普通の製品ぐらい持つこと)
- 左右ボード間の接続は有線
- USB に逃げたくなったとき逃げられるようにしておく
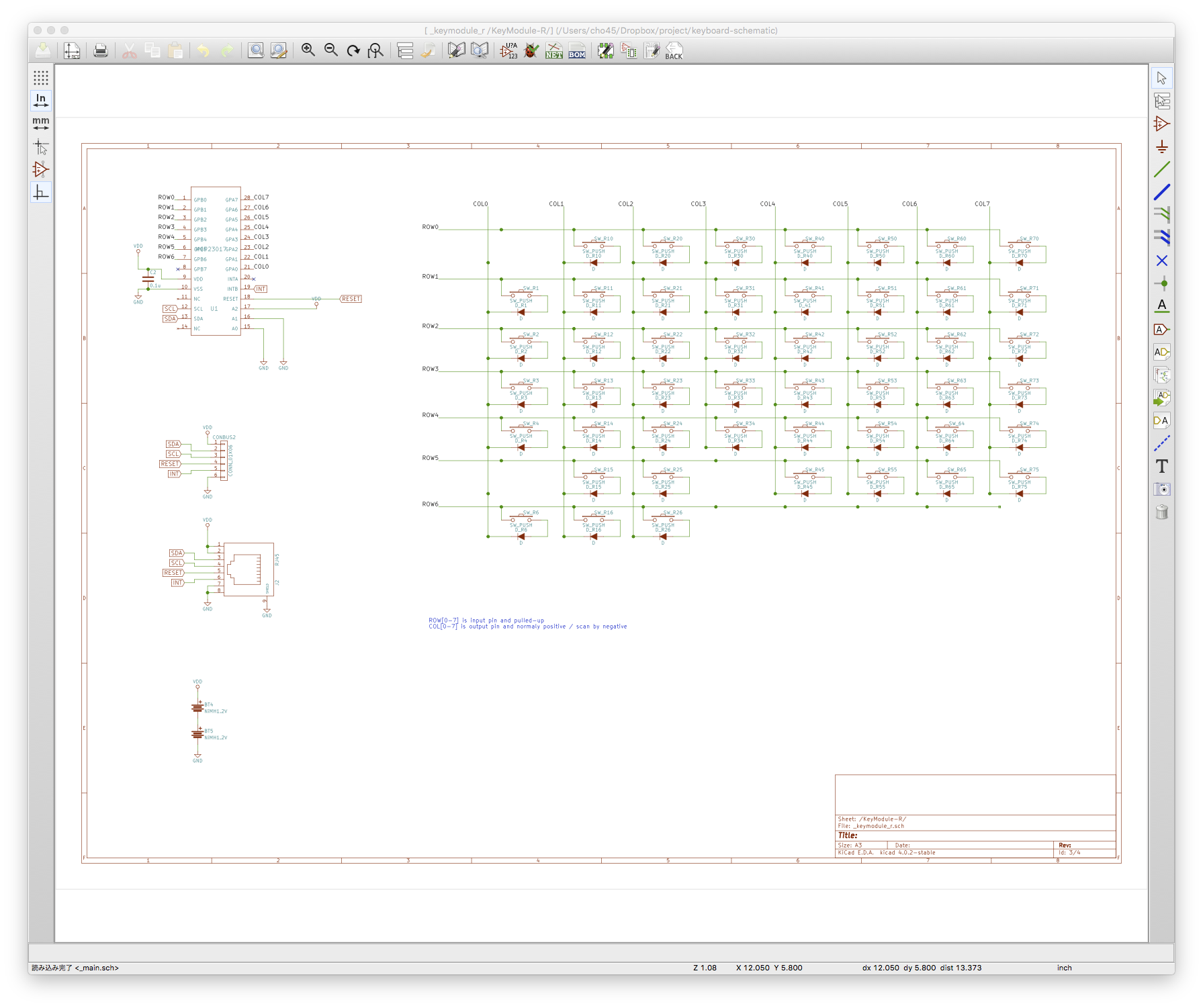
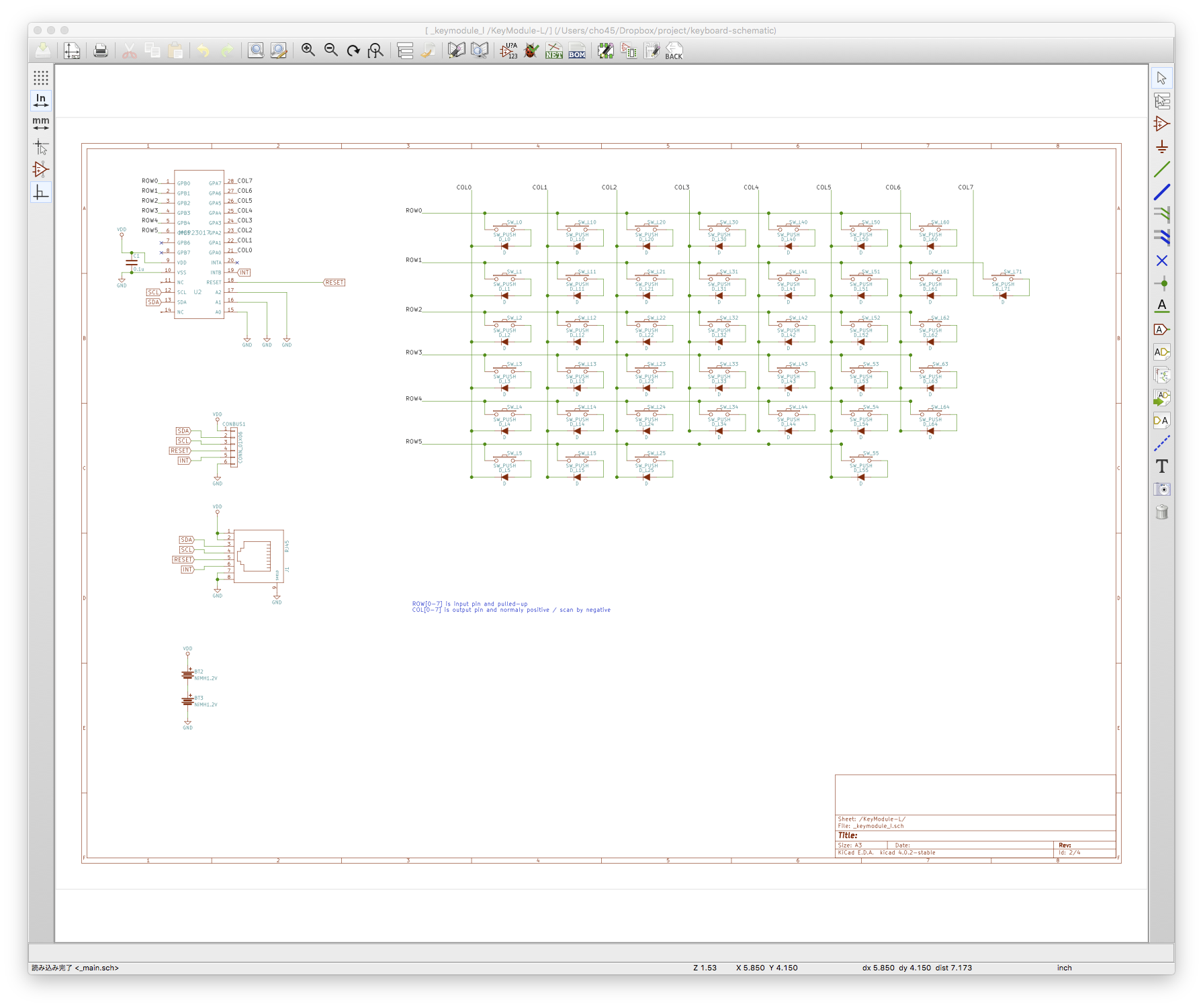
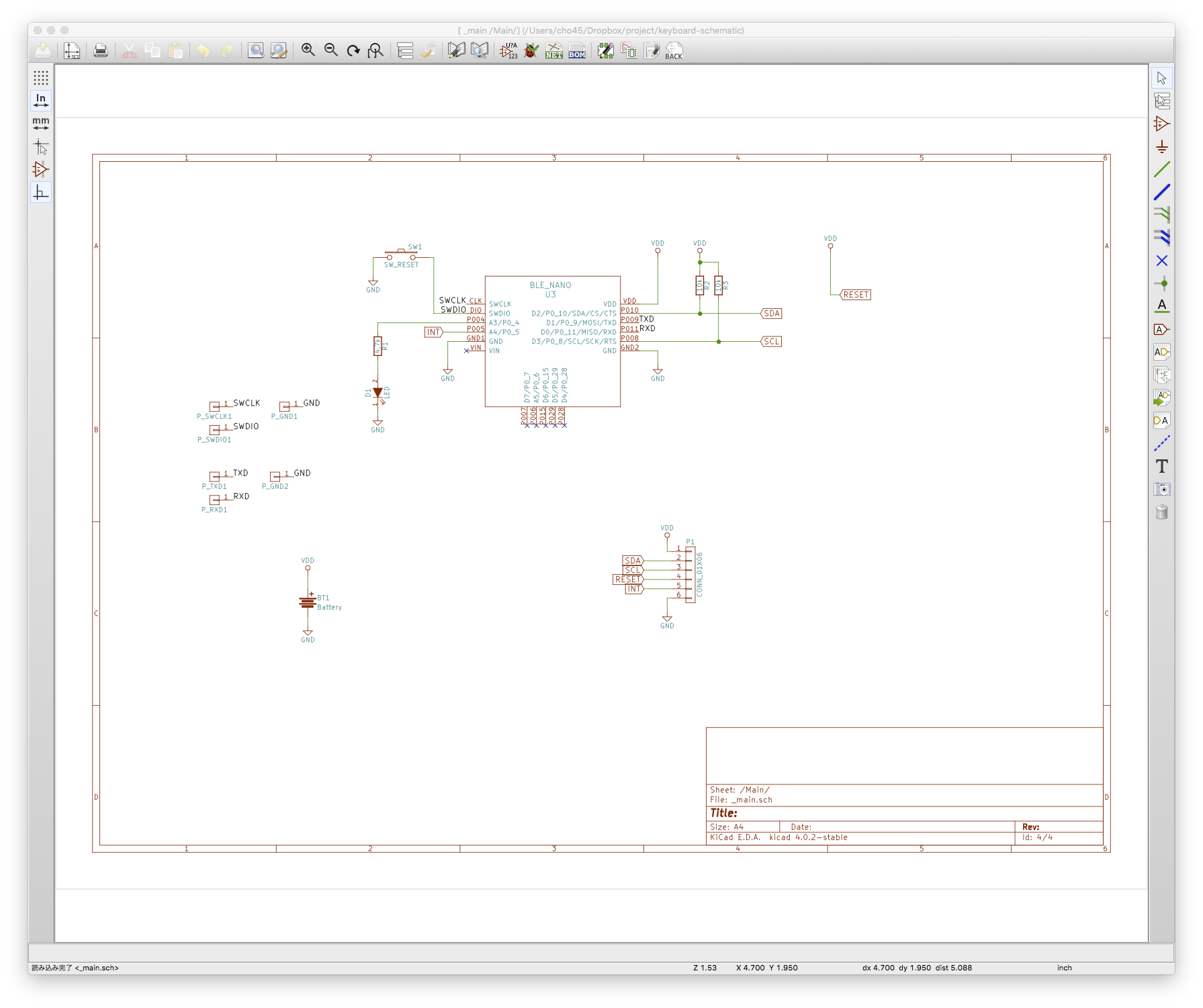
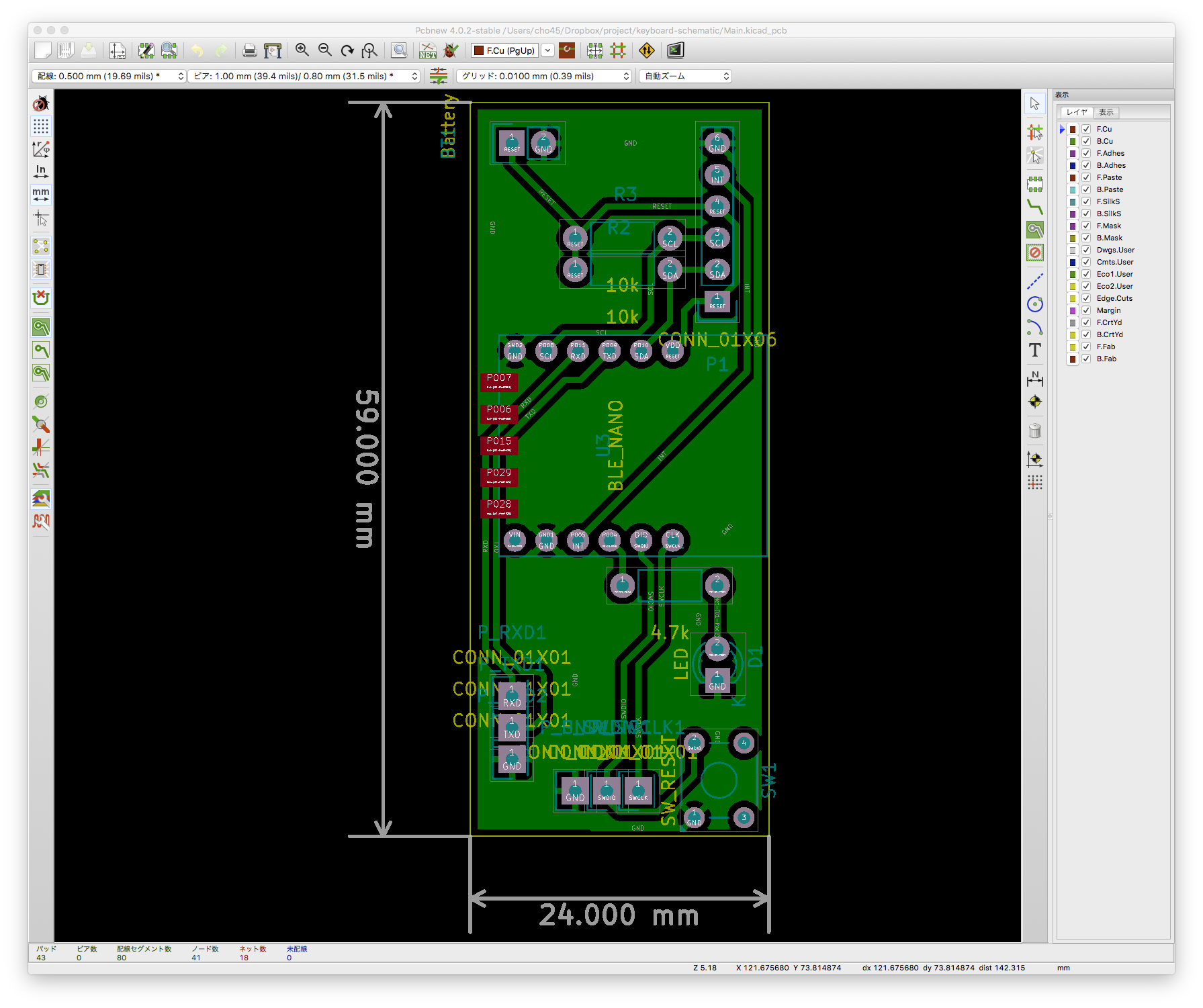
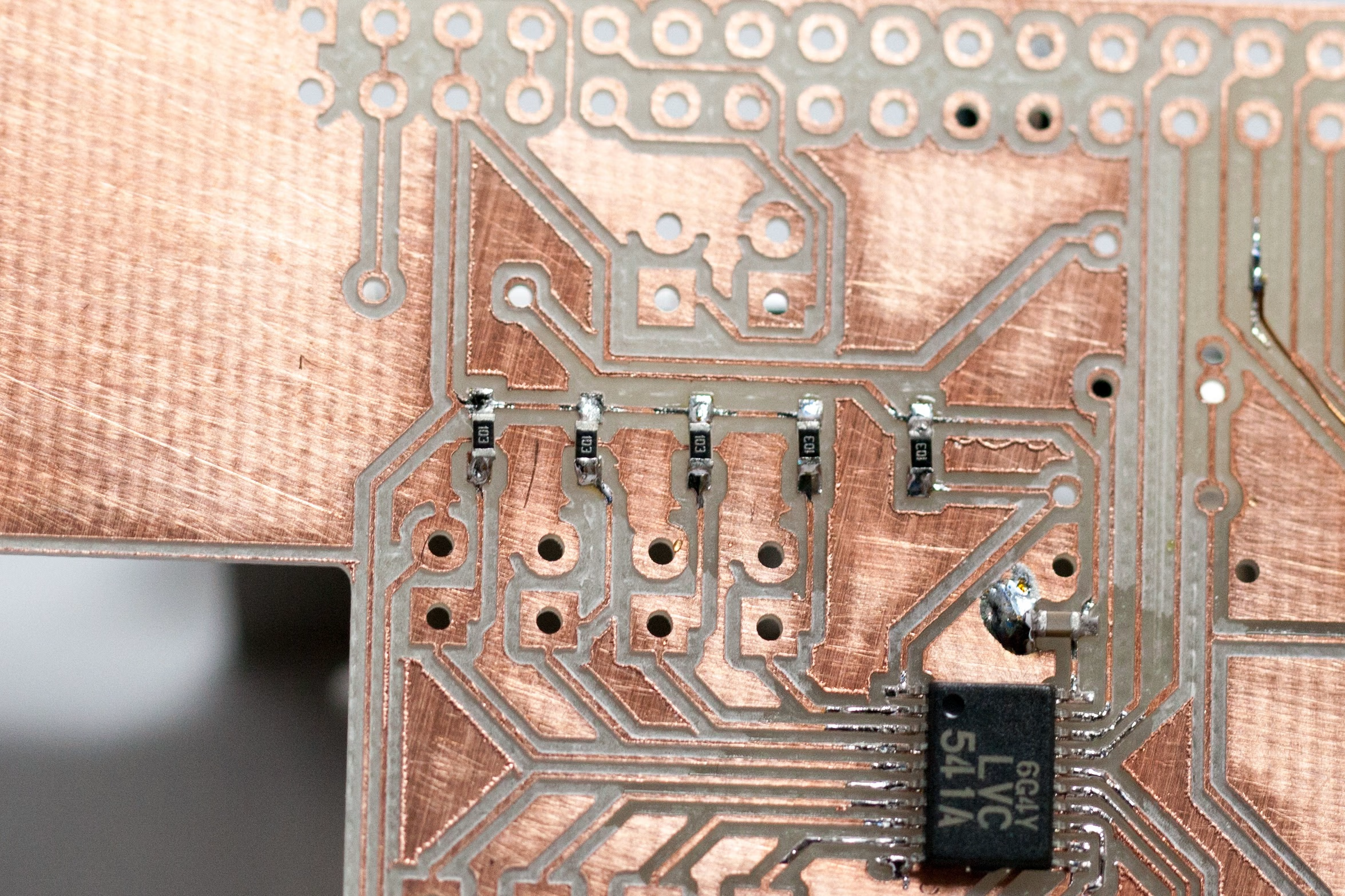
- 制御用のボードは分離して設計すること
一方、躯体については殆ど考えてなくて、いきあたりばったりで基板を作ってから3層構造にした。製作編で詳しく書く。
なお省電力であればあるほどいいけど、そこそこ電波が出るデバイスなので、BLE が生きるぐらいの省電力にはならないだろうという気はしてた。
左右のキーボード間も無線にしたかったが、セキュアにしようと思うと BLE Nano 2台でそれぞれHIDキーボードにしてしまうのが楽ということになってしまう。今回はそういうことはしたくなかったので、ここは有線で妥協した。
ただ、左右どちらも回路構成が完全に一緒なので、単に制御用の基板を2つ用意して取り付ければそれぞれHIDキーボードとして使うことができるようにはした。
つづく → 500 Can't connect to lowreal.net:443 (certificate verify failed)
関連エントリー
- HHKB を左右分割エルゴノミクスキーボードにする (OSX) 標題の通りですが HHKB を半分に割ってブチ壊すみたいな話ではないのでご安心ください。 HHKBを2台用意します。 HHKB 2台を横に並...
- ✖ そういえば分割キーボードの話で、左右共通の基板にするために切り取り先を入れて折れるようにするアイデアが面白いと思った。 キーボード基板はそれ...
- ErgoDox ではないナニか。オープンソースかつ Bluetooth 接続のキーボード ここ数ヶ月ぐらいキーボードを作っていた。そのためにいろいろ yak-shaving としかいいようがないことも多々していた。 いろいろ書くこ...
- NiZ Keyboard PLUM という静電容量無接点キーボード (この写真のキー配列はデフォルトのものではなく、既にカスタマイズ済みです。mac 用のキーキャップが付属しており、HHKB を基準にできるだ...
- NiZ X87EC(S) 35g (2021) を買ってみた 66EC(S) Ble 35g を買ってから自宅では結構ずっとこれを使っていてそこそこ満足している。これも含めて HHKB 風配列のキーボー...