Raspberry Pi を中心にやってみようとしているところ
Raspberry Pi せっかくあるので、一応作りたい目標をもっていろいろ試してみてる。現時点での思惑を書いておく。
概要
無線機の周辺を拡張して、PCと連携しやすくしたり便利にしたり、というのが目的。具体的には
- 無線機の Wi-Fi 化
- API サーバになってLAN内のコンピュータから無線機の情報を取得・設定する
- アンテナ切替情報の取得・設定
- そのたもろもろ
全体
- Raspberry Pi
- I2C バス
- アンテナ切替コントローラー (AVR)
- センサー計 (温度など)
- シリアルポート
- 無線機コントロール (RS-232C 変換)
- I2C バス
- WebSocket サーバー
- 周辺機器の中央集権サーバー
- 無線機コントローラー
- アンテナ情報
- センサーなど
- 周辺機器の中央集権サーバー
ある程度拡張性を持たせつつこれらを収めたい。無線機の近くで使うので、ある程度ノイズ対策が必要かもしれない。
ブロックごとの設計
電源部
- アンテナ切り替えリレー用に 12V (最大 400mA 程度) が必要
- Raspberry Pi が 5V 700mA が必要
- ほか周辺機器分はそんなに食うものがないので、かなり余裕を持っても 5V 500mA ぐらいあればよさそう
- Raspberry Pi の GPIO が 3.3V で接続機器もあわせたいので 3.3V も必要
12V が必要なので、ACアダプタとして 12V を使い、降圧して 5V, 3.3V を作りたい。
- 12V 500mA (6W)
- 5V 1A (5W)
- 3.3V 500mA (1.65W)
ぐらい確保できたら十分そう。PC用の電源だと、100Vから直接これらの電圧を全部調達できるけど、コストはともかくオーバースペックでデカすぎる。
12V 2A ぐらいのACアダプタ (24W) から 5V はスイッチングである程度高容量を高効率でとりだして、3.3V は 5V からリニアレギュレーターで安定化させる感じにする。
http://akizukidenshi.com/catalog/g/gM-02038/
5V 3A のスイッチングDC/DCコンバーターで、変換効率は最低でも73%。
- アダプタ: 12V 2A
- 12V 500mA
- 12V 1.5A (18W) -> 5V 2.6A (18 * 0.73 = 13.14W)
- 5V 1A
- 3.3V 500mA を 5V からリニアレギュレーターで作ろうとすると、電圧差はそのまま熱になるので ( (5 - 3.3) * 0.5 = 0.85W が無駄になる)、単に 5V 500mA を消費すると考えることができる。
アンテナ切替コントローラー
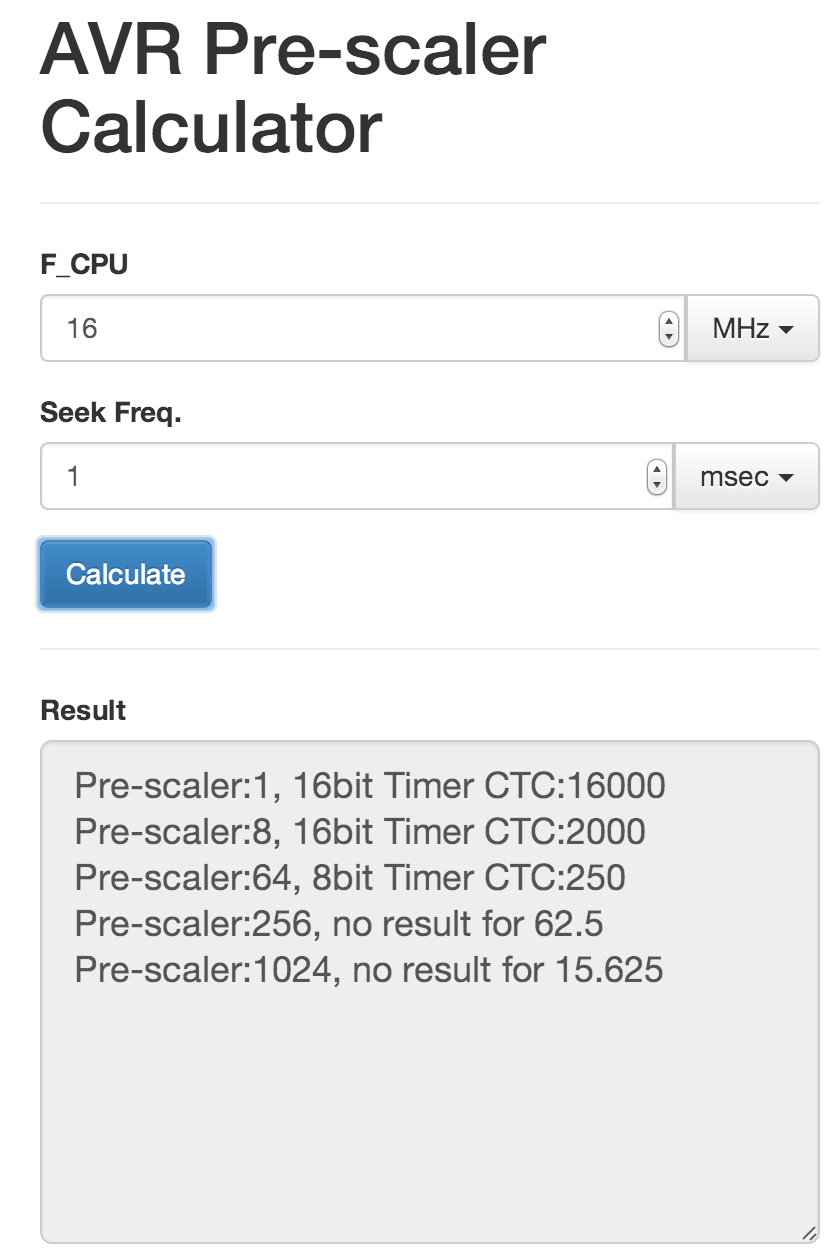
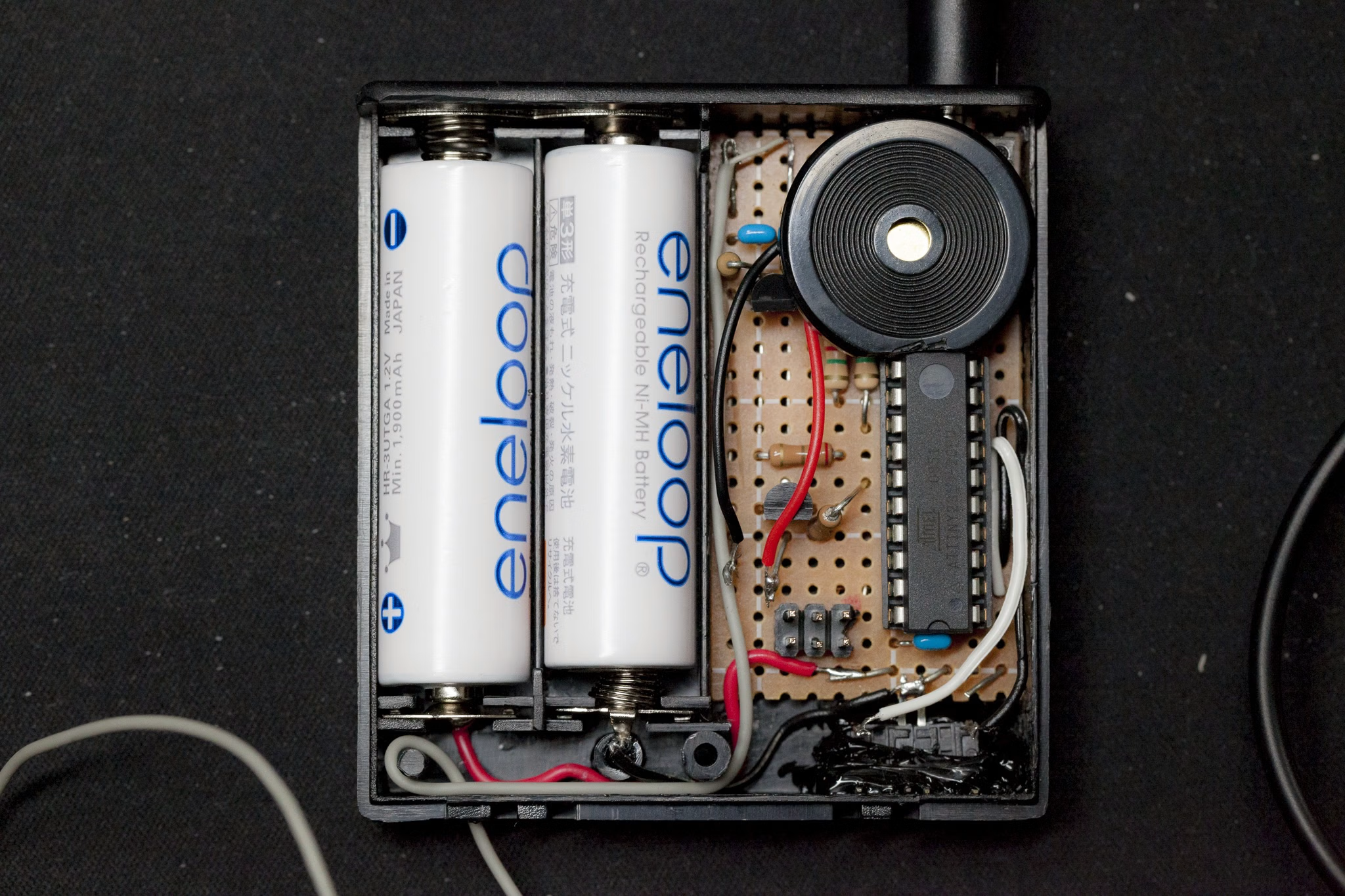
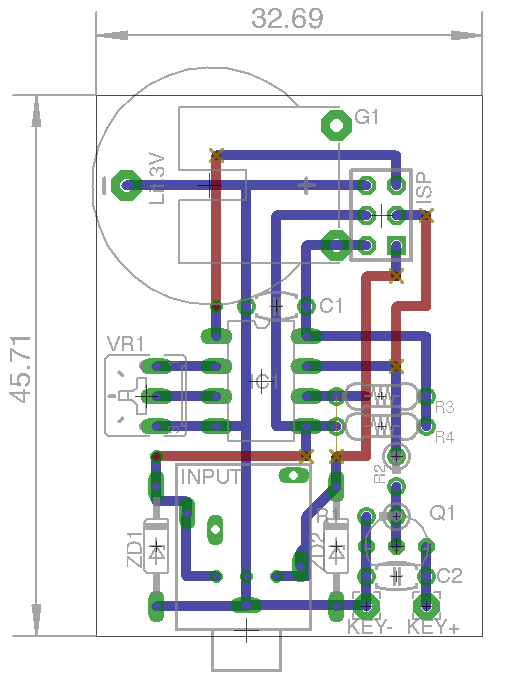
ATmega168P をつかって実装。TWI (I2C) がついてるので簡単。内蔵8 M クロックで動作させて、アンテナのリレーのコントールをI2C経由及びボタンで行い、LED でどのアンテナが有効かを表示する。
リレーは2〜6つほどを同時に駆動する必要があり、この時最大で 400mA ほど流れる。かなり余裕があり、3.3V でも十分スイッチできるパワーMOS-FET でスイッチングする。
電源は I2C を Raspberry Pi と直接繋げたいので 3.3V 供給
センサー類
基本的に I2C 対応、3.3V 品なので、そのままバスに繋ぐだけ。ごちゃごちゃやりたいのでブレッドボードを内蔵してそこに差す
RS-232 変換
無線機とのインターフェイスのために RS-232 変換をする。
関連エントリー
- Raspberry Pi の実測消費電力 (電流量) Raspberry Pi の実測電流値が気になったので安定化電源に繋いで適当に計ってみた。 アナログで読んだのでだいたい。USB Wi-Fi...
- 12V, 5V, 3.3V 電源 Raspberry Pi を中心にやってみようとしているところ | avr | raspberrypi | ham - 氾濫原 について、ま...
- MLA 自動同調コントローラ SWR 計を作ったので、これと連携して、MLA のモーター動かして自動的に同調させる。 SWR 計つくったのは、そもそも本来これがやりたかっ...
- 超小型 DC/DC ステップアップコンバータ SX1308 2A $0.99 VIN 2〜24V VOUT 2〜28V 2A 効率最大95% スイッチング周波数1.2MHz という表示のもの。 スイッチング周波数が高く...
- SKR Mini E3 V3 の NeoPixel ピンの最大数 ボード組み込みで8個まで、BIGTREETECH DCDC5V V1.0 module をつけて30個までらしい。ref. https://...