Raspberry Pi のローレベル周辺機器の電源を特定プロセスが動いているときだけオンにする
GPIO ピンからとれる電源は普通に電源回路直結なので、Raspberry Pi 自体が起動していようがしていまいが、電源ケーブルさえ接続されていれば供給されています。まぁこれはいいんですが、Raspberry Pi 本体が起動していないとき、もっというとそれらを扱うデーモンが起動していないときに電源供給されてもエコじゃないので、なんとかしました。
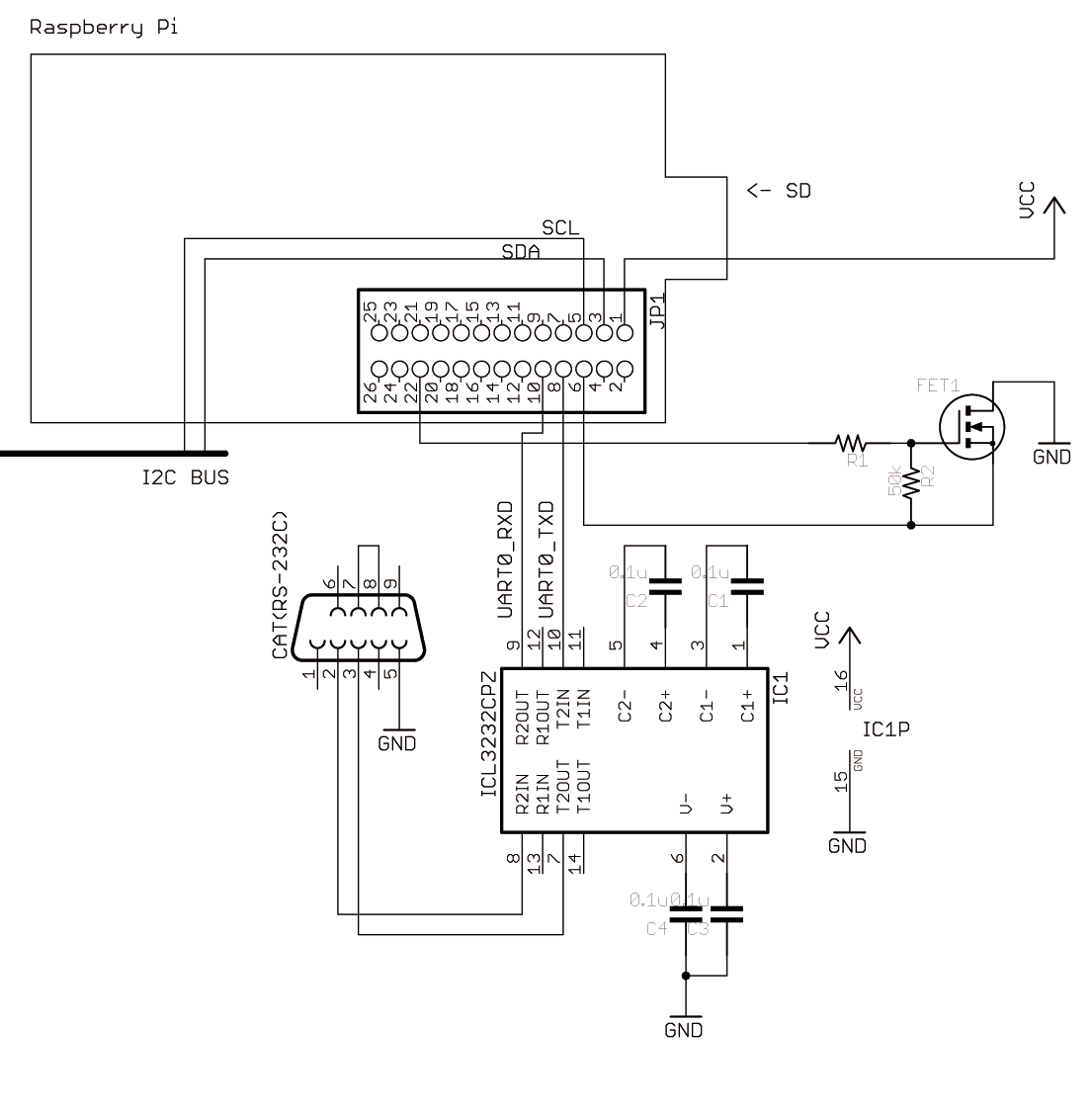
回路図
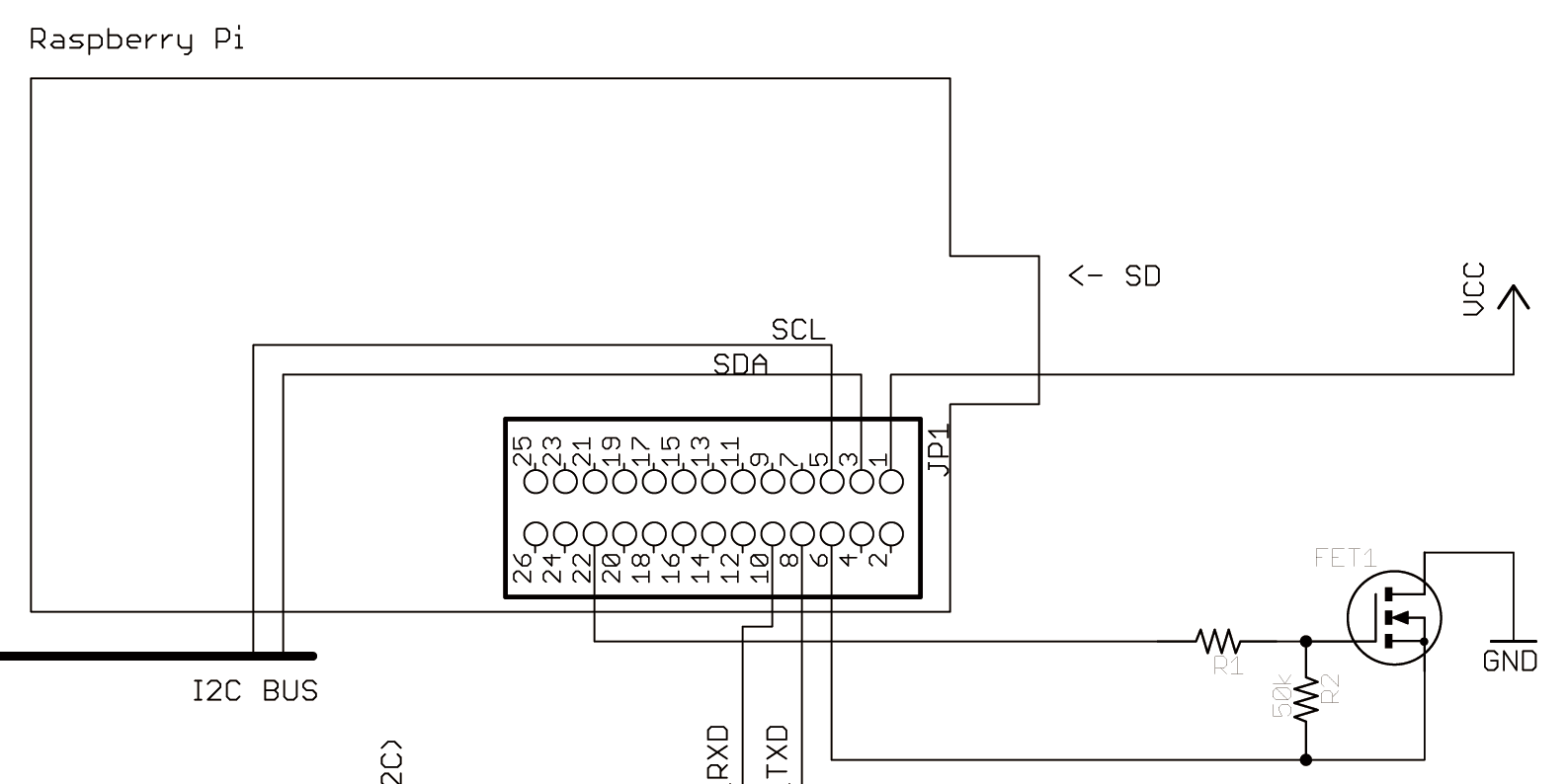
ちょっと余計な線がありますが、キモは FET だけです。伸びてる GND と VCC を周辺回路に繋ぐと、GPIO 25 (22pinから出てる) の論理によってオン・オフします。
手元では 2SK2796L を使ってます (3.3V で直接駆動できるので)
コード側
単に GPIO 25 ピンのハイ・ローを切り替えるだけです。Ruby の場合以下のように
#!/usr/bin/env ruby
# coding: utf-8
module GPIO
def self.export(pin)
File.open("/sys/class/gpio/export", "w") do |f|
f.write(pin)
end
end
def self.unexport(pin)
File.open("/sys/class/gpio/unexport", "w") do |f|
f.write(pin)
end
end
def self.direction(pin, direction)
[:in, :out].include?(direction) or raise "direction must be :in or :out"
File.open("/sys/class/gpio/gpio#{pin}/direction", "w") do |f|
f.write(direction)
end
end
def self.read(pin)
File.open("/sys/class/gpio/gpio#{pin}/value", "r") do |f|
f.read.to_i
end
end
def self.write(pin, val)
File.open("/sys/class/gpio/gpio#{pin}/value", "w") do |f|
f.write(val ? "1" : "0")
end
end
end
GPIO.export(25)
GPIO.direction(25, :out)
GPIO.write(25, true)
at_exit do
GPIO.write(25, false)
end
sleep 3 # 周辺機器が安定するまで適当な時間
... at_exit でローにするようにしてるだけです。
備考
回路図だとわかりにくい感じだけど、これは GND 側のスイッチ (ローサイドスイッチ) で、VCC は繋がりっぱなしなので、Raspberry Pi 以外の他の電源を回路に接続するとよくないかもしれないです。
ぜんぜんよくわからないんですが、こういう回路はハイサイドにしたほうが安全なのかな。応答速度はあまり必要ではないし……
関連エントリー
- Ruby で sysfs 経由での GPIO 操作 GPIO の操作はいろいろやる方法があるみたいだけど、LL からだと sysfs への IO を行うのが一番簡単っぽい。以下のような感じでか...
- Node.js の fs モジュールだけで GPIO の割込みを扱うには? 以下のようにすれば動くことが確認できた。 select や poll を明示的に呼び出すことができないが、edge を設定しさえすれば fs...
- MH-Z19 という格安 CO2 センサを読んでみた 郑州炜盛电子科技 という会社の MH-Z19 という CO2 センサを買ってみました。Aliexpress で $22 ぐらいでした。 非分...
- GPIO (sysfs) を使ったソフトウェア I2C 普通の GPIO 経由で I2C できたらなんとなく嬉しいかなと思って作ってみた。つまりソフトウェアでピン状態をいじって I2C 通信すると...
- NanoPi NEO2 + NanoHAT OLED に armbian しばらく放っておいてどうセットアップしたか忘れたので、https://www.armbian.com/nanopi-neo-2/ armbi...