スペクトラムアナライザ DSA815-TG を買いました / LAN経由でスクリーンショットとれるようにしました

RIGOL (リゴル) 1.5GHzスペクトラム・アナライザ(トラッキング・ジェネレータ機能付) 【国内正規品】,DSA815-TG cho45
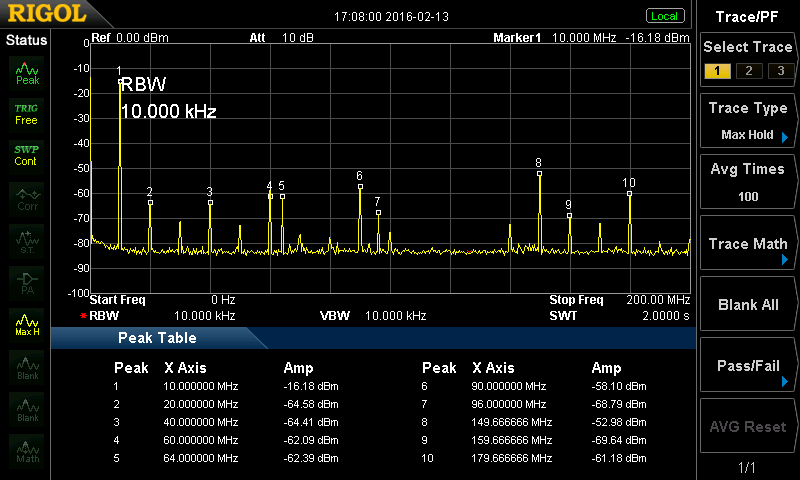
やっぱスペアナは欲しいよなあと思いはじめて数ヶ月、決心がついたので買いました。技術力が低いので本当に金額に見合うぶんだけの活用ができるかは微妙ですが「見えないものが見えるようになる」というメリットに抗えませんでした。
スペアナといっても現状ではいくつも選択肢があります。USB 接続のものはハードのインターフェイスがいらない分をスペックにコストをかけられるので、スペック的には良さそうです。
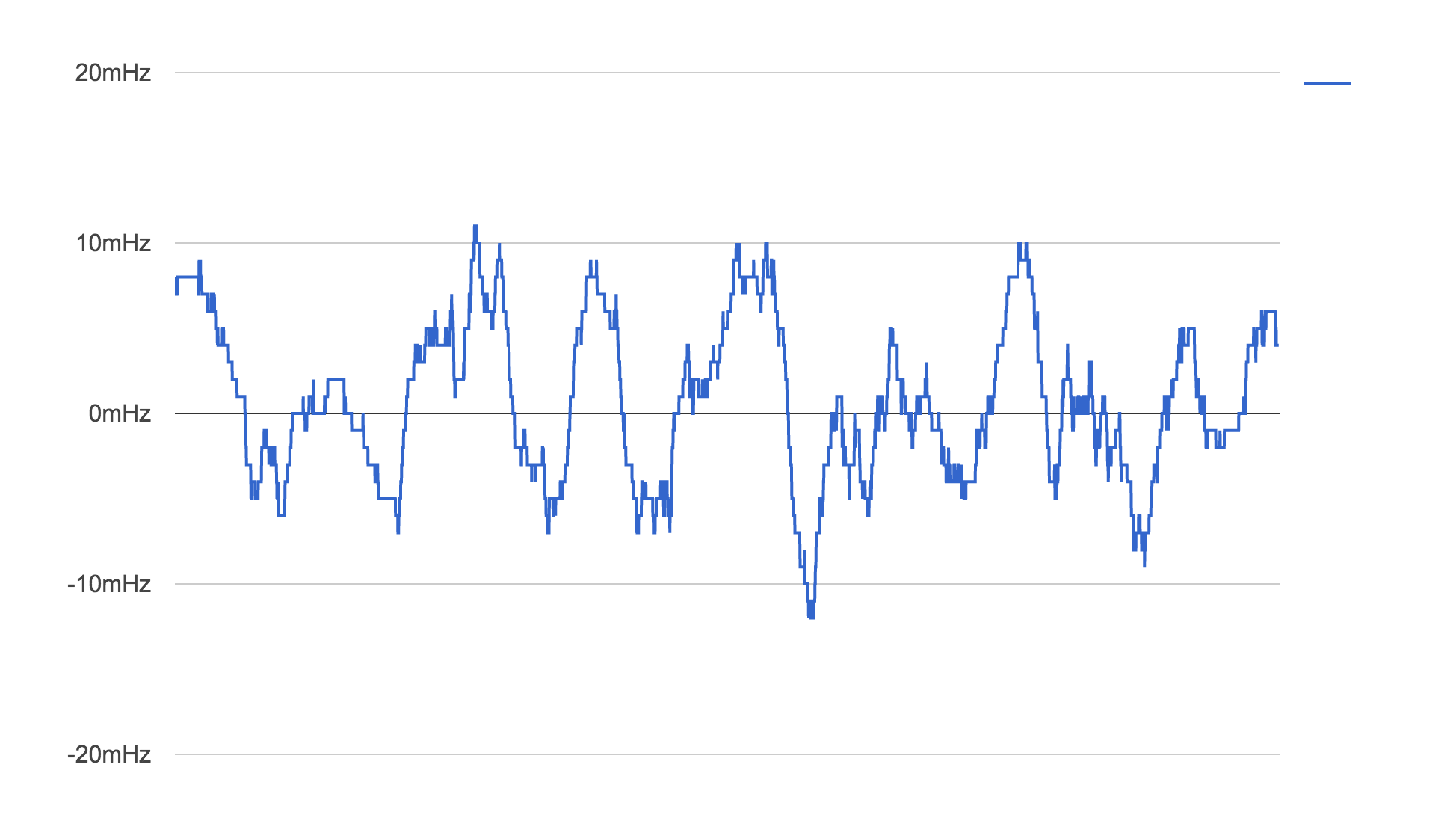
DSA815-TG は位相雑音(ゆらぎ/時間ドメインでのジッタ)が多いというのが大きな欠点の一つのようです。高純度の信号の測定ができないことを意味しますが、この欠点がどれぐらい今後に影響してくるのかまだわかっていません。
しかしやはり欠点はあってもスタンドアロン型のもののほうが使い勝手は良さそうです。電源入れれば使えるというのは大事に感じます。USB 接続してアプリを立ちあげてという手順は地味にだるいのです。そういうところを考えると、スペックが良くても使う頻度が少なくなってしまうのは一番損になりますから、スタンドアロンのものにしました。
この機種は数年前までは15万前後で買えたみたいですが、円安進行のためか、かなり値上りしています。悔しいところですが諦めて18万ぐらいで買いました。当然トラッキングジェネレータ付きです。
所感
思ったよりも反応が良くて使いやすいです。
UIを日本語設定にすることができますが、この手の中華製品にありがちなひどい明朝フォントになったりはせず、普通に使えるレベルだと思います。とはいえ英語設定で使ってますが…
他に買ったものや欲しいもの
10dB アッテネータはマトモなやつを1つ買いました。追加でいくつか安いアッテネータを注文しています。

スペクトラム・アナライザによる高周波測定―高調波,不要輻射,変調,ひずみ,位相ノイズ,伝送特 (計測器BASIC) cho45
この本は買う前に読んでいました。アマゾンではなく、CQ出版社のサイトから PDF を買ってます。
あとはリターンロスブリッジ (VSWR ブリッジ) が欲しいので作るかどうするか、という感じです。
方向性結合器は自分の欲しい周波数帯・耐電力のものは全く売っていないので作るしかありません。一度作っていますが、もっといいのを作りたいところです。
とはいえ50MHzまでならアンテナアナライザーもあるので、そこまで必要でもないかなという気がします。
LAN 経由でスクリーンショットをとる
まず測定画面のスクリーンショット(ハードコピー)ができないとかなり不便なので、ここから解決しました。
できたもの
プログレスを出しつつスクリーンショットをダウンロードしてこれます。ダウンロードしたあとは imagemagick の convertコマンドで png に変換し、optipng コマンドで最適化します。
ダウンロード部分にはライブラリ依存が一切ないので Ruby さえ動けば bmp ダウンロードはどこでも動きますし、LAN 経由なので一切ドライバなどが必要ないのが良いところです。
png 変換時には imagemagick コマンドと optipng コマンドが必要です。
測定器とのコミュニケーションプロトコル
DSA815 には USB 経由での GPIB 通信と、LAN ケーブル経由での VXI-11 (というよりは、LXIの一部)がサポートされています。
このへん、用語がいっぱいあるので整理しとくと
- GPIB (IEEE488)
- すごく古くからあるパソコンと計測器を繋ぐバス規格
- 今は USB 経由に変換して繋ぐのが普通なようだ?
- VXI-11
- GPIB をイーサネット上で再現するような規格
- LXI
- LAN経由で計測器繋ぐというのをまとめた上位規格
- Web インターフェイスとか、生TCPソケットとかの定義を含みつつ、VXI-11 も含む。
- VISA
- 計測器用プロトコルをひとまとめにした上位規格
- VISA の裏側で GPIB とか VXI-11 とかが動いているイメージ
「というよりは、LXIの一部」と書きました。DSA815 はドキュメントには書いてないのですが、生のTCPソケット経由での通信もできるようになっていて、実はこれが一番簡単です。LXI の仕様では生TCPソケットの通信はポート5025を使うような記述がありますが、DSA815 では 5555 ポートです。
DSA815 でスクリーンショットコマンド
:PRIV:SNAP?
を送ると、11バイトのヘッダ(ファイル長を含む)とビットマップファイルが送られてきます。この :PRIV:SNAP? は隠しコマンドのようで、公式の Programming Reference にはありません。PRIV は Private の略なんでしょう。別のクライアントの通信からわかったので微妙なところです。
ref.
- http://cp.literature.agilent.com/litweb/pdf/5989-6717JAJP.pdf Linux を使用した LXI 測定器の 制御:VXI-11 の使用
- http://cp.literature.agilent.com/litweb/pdf/5989-6717JAJP.pdf Linux を使用した LXI 測定器の制御:TCP の使用
関連エントリー
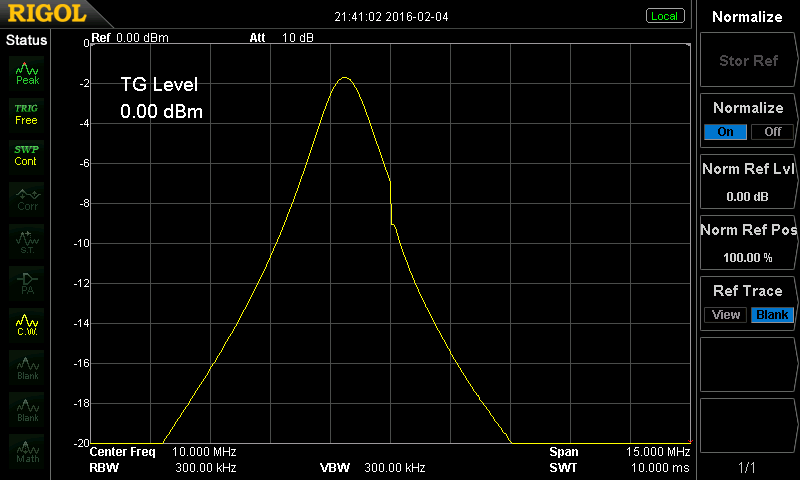
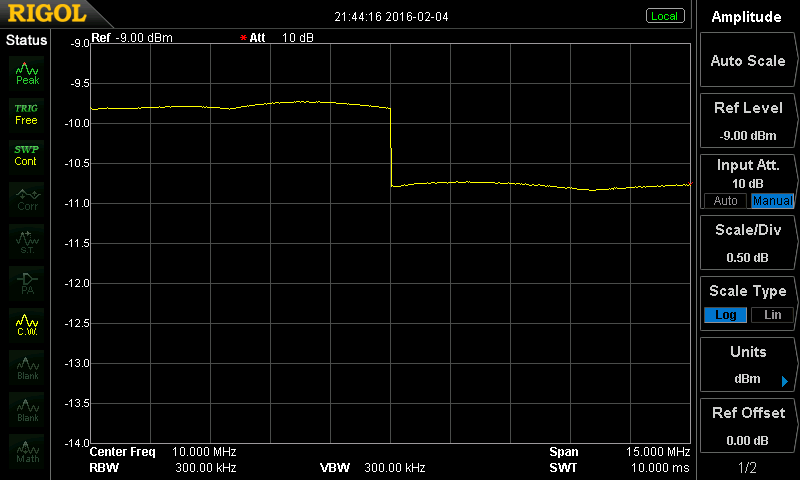
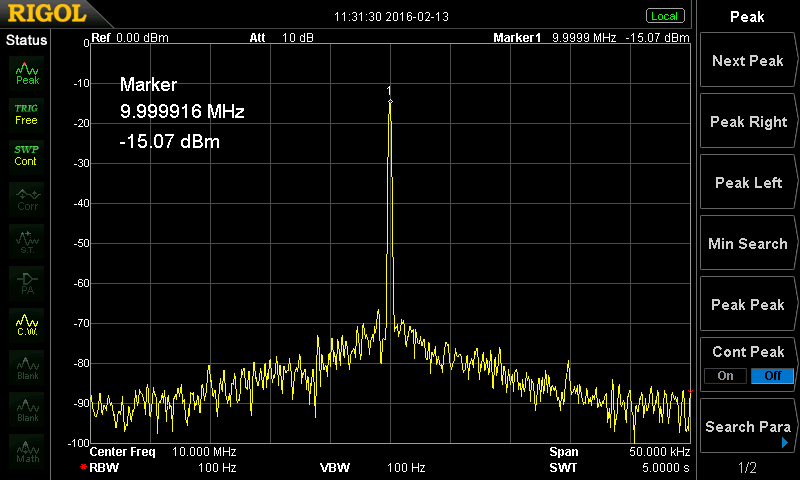
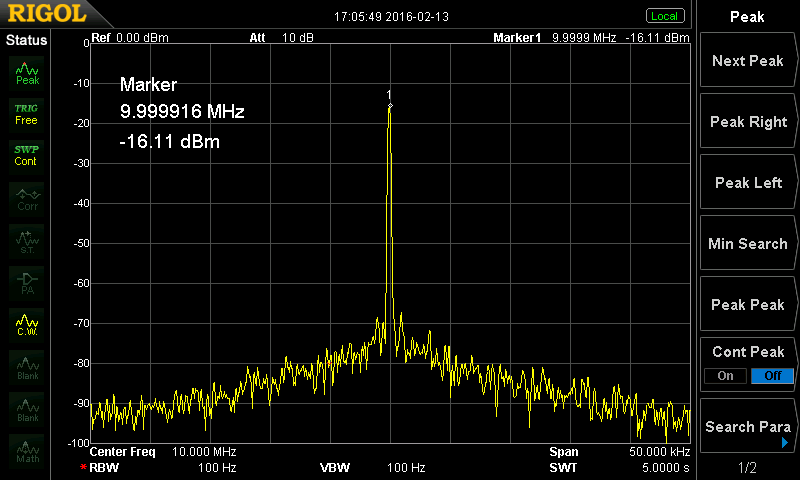
- DSA815-TG の 10MHz 付近の奇妙なバグとファームウェアアップグレード 測定中、10MHz 付近に急激な落ちこみが観測されることがあって気になっていました。そういうものなのかなとも思ったのですが、調べてみたら同じ...
- スペアナとリターンロスブリッジを使ってSWRを測ってみる リターンロスブリッジを買ってみたので、手元にあるいろんなものを測ってみました。 測定方法 普通のリターンロスブリッジなので、DUT をオープ...
- SDS7102 のスクリーンショットを LAN からとる 普通にルーターと接続してアドレスとかを設定すると、設定したポートで listen するようになってるのでコマンドを送るだけ。 なので自分で ...
- NanoVNA の測定メモ 前につくったアッテネータを測ってみる https://lowreal.net/2016/03/13/1 NanoVNA だと 300MHz ...
- オシロスコープ Rigol MSO5074 を買った RIGOL デジタル・オシロスコープ MSO5074 70MHz 周波数帯域+4チャンネル+16デジタルアナログチャンネル+8bit垂直軸分...