やりたいことに対して時間が足りなすぎる。
✖
![]()
![]()
![]()
やりたいことに対して時間が足りなすぎる。
![]()
![]()
![]()
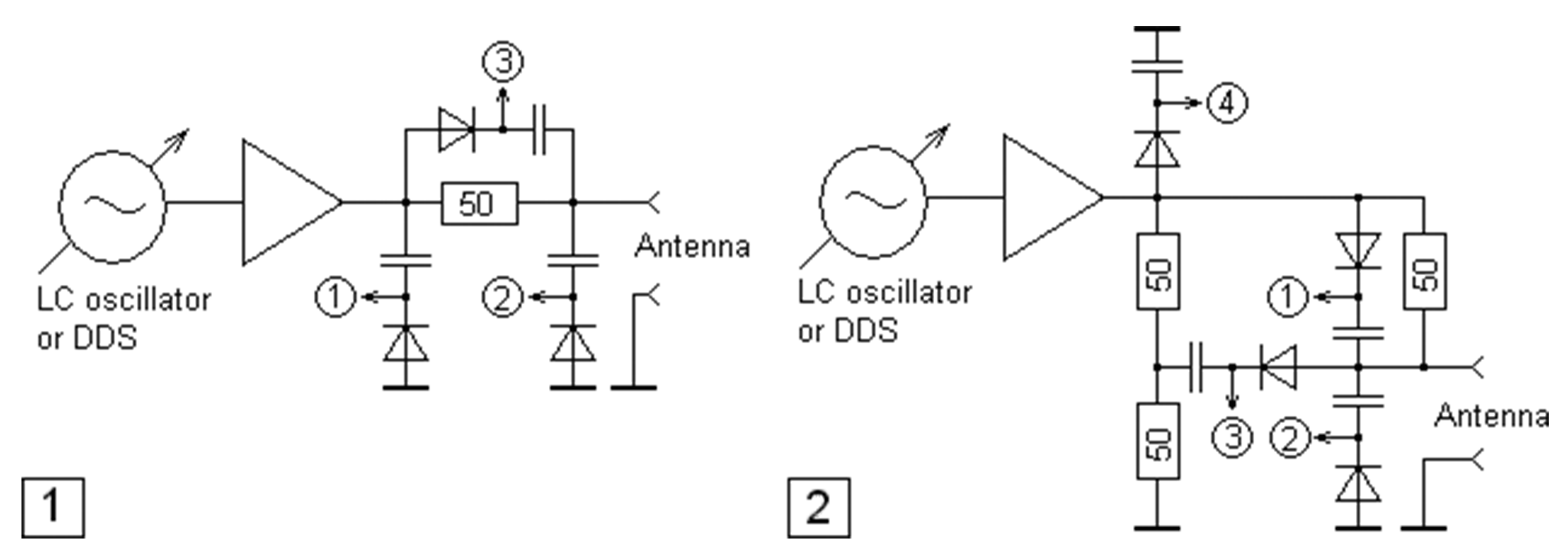
このページが面白いので、1つ1つ見ていきたいという気持ちがあります。まずは一番上の Analyzers based on diode detectors のうち、抵抗1本を検出に使うものです。
やってることは負荷インピーダンスを電流と負荷電圧から求め、さらに入力電圧との関係からリアクタンスの絶対値まで求めるものです。
1 を 、2 を 、3 を という名前にします。
負荷 に対し、それぞれの電圧を としとき、負荷 にかかっている電圧 の絶対値(検波値) は
回路全体にかかる電圧 は
(1) の式を について解いて
(3) を (2) に代入する。
これを について解く
(3) の式のルートをとって を求めると
また、回路全体の電流 は
負荷 の と はそれぞれ
となり、抵抗成分とリアクタンス成分の絶対値が求まる (容量性か誘導性かはわからない)
![]()
![]()
![]()
これはリターンロスブリッジを使う形のものです。
とすると
と から電圧反射係数が求められます。 で入力電圧を求め、 で得た電圧反射係数を正規化するイメージ)
と から負荷インピーダンスの絶対値がわかります。
一番問題なのはブリッジに接続されている がどのようになるかです。負荷側の電位は50Ωと負荷インピーダンスとの分圧、もう片方は50Ωと50Ωの分圧で固定になっています (すなわち入力電圧の0.5倍が基準点)。
ここでもし負荷インピーダンスが50Ωであれば、負荷側の分圧も入力電圧の0.5倍になり、ブリッジ部分の電位差はゼロになります。ブリッジの平衡状態です。
負荷インピーダンスが25Ωになると、25/(25+50)=0.333... で電位差が -0.1666...、100Ωになると 100/(100+50)=0.666... で電位差が 0.1666... になります。つまりここの電位差は基準インピーダンス50Ωに対しての比になります。
もし入力電圧が1Vだとしたら、この電位差の2倍がすなわち電圧反射係数になります。(反射係数には複素数の場合、角度が出てくるが、位相は計っていないのでこれはわからず、この反射係数は絶対値です)
ブリッジ中の負荷インピーダンスを とし、それ以外のインピーダンス値を とすると、入力電圧が1Vのときのブリッジの電位差 E は以下のようになります。ここで、 をブリッジの50Ω/50Ωで分圧された側の電位、 を負荷側の電位としています。
電圧反射係数は
なので、1Vのとき、ブリッジの電位差は反射係数の半分になっています。また、 は入力の半分の電圧になりますから、ブリッジ電位差 を で正規化することで反射係数そのものを求められます。
反射係数の大きさと、負荷インピーダンスがわかると、まず負荷の抵抗成分を求められます。
反射係数の大きさ 、伝送路インピーダンス 、負荷インピーダンス の関係は以下の通りです。
は 50Ω なので 50 で置き換え、Z は R + jX に置き換えます。
絶対値同士の比なので分子分母とも絶対値にします
負荷インピーダンスの絶対値が既知ですから
(2) を (1) に代入します
難しいので maxima で解かせて
R が求められれば 、Z との関係から X の絶対値も求められます。
VSWR は以下のような式で求められますが、これは負荷インピーダンスが純抵抗な場合 (jX = 0) だけで、純抵抗でなければ反射係数を一旦求める必要があります。
この式を前提にインピーダンス比がSWRになる(インピーダンスがSWRに直接関連づく)と覚えていると、SWRと負荷インピーダンスの値から R が求められる理屈がわからなくなります。
インピーダンス比からSWRを求めた場合、純抵抗を想定してSWR値を求めたわけですから、このSWRと負荷インピーダンスからRを逆算すると、必ず jX の項は0になります。
別の説明をすると、たとえ同じ絶対値の負荷インピーダンスでも、リアクタンス成分でSWRは上がります。Z = 50 であっても、50 + 0j の場合と 0 + 50j の場合では違うよということで、前者のSWRは1ですが後者は無限です。
![]()
![]()
![]()
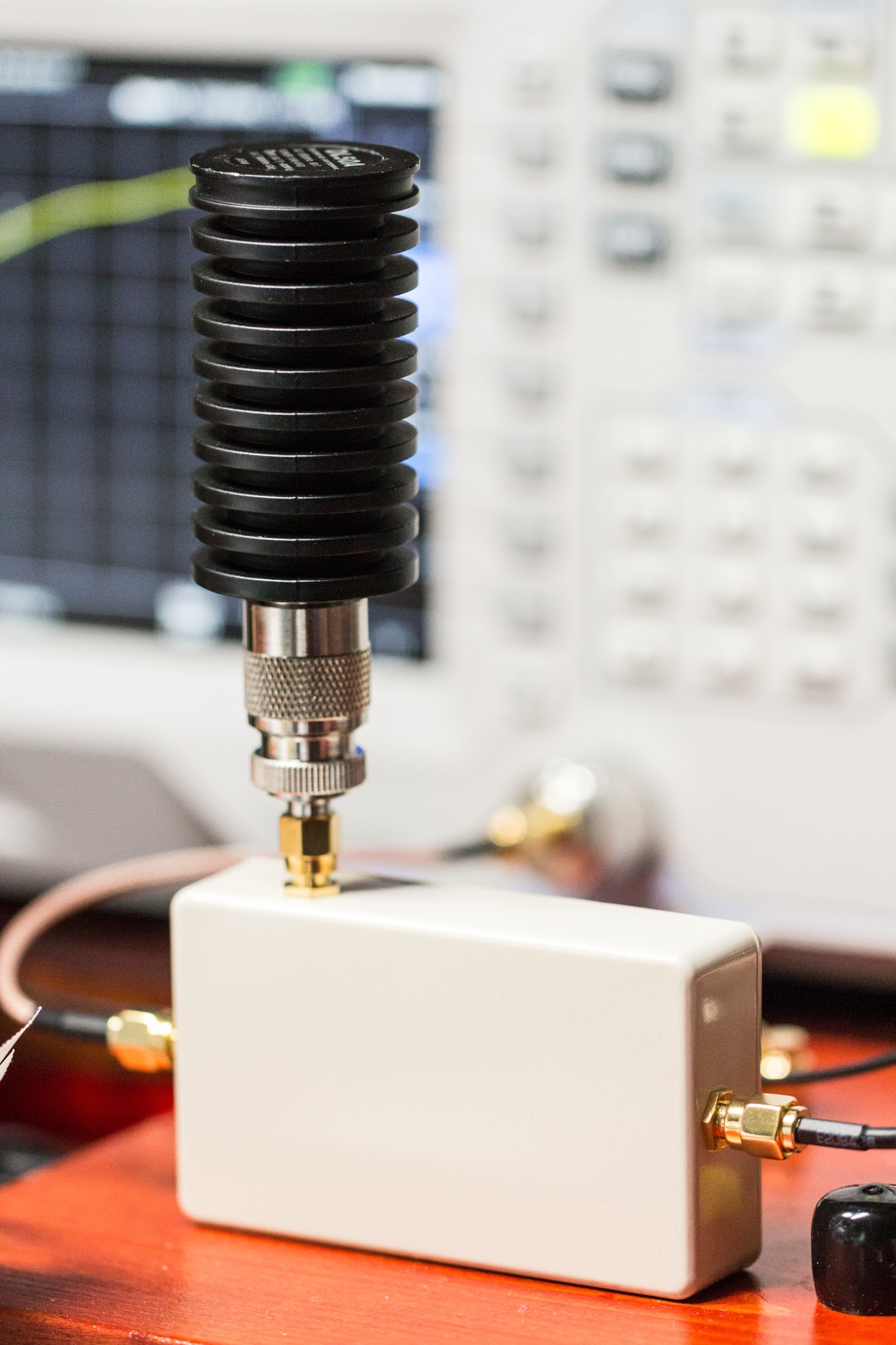
リターンロスブリッジを買ってみたので、手元にあるいろんなものを測ってみました。
普通のリターンロスブリッジなので、DUT をオープンしてノーマライズ、DUT に測定対象を接続してリターンロスを読みます。

ちょっとだけ長いやつ (耐電力 2Wのもの)
短いやつ 1W か 0.5W
もうひとつ短いやつ
ダミーロードが悪いのかリターンロスブリッジが悪いのかよくわかりませんが、そこそこまでしか測れなそうです。実用上はまぁまぁ使える感じでしょうか…

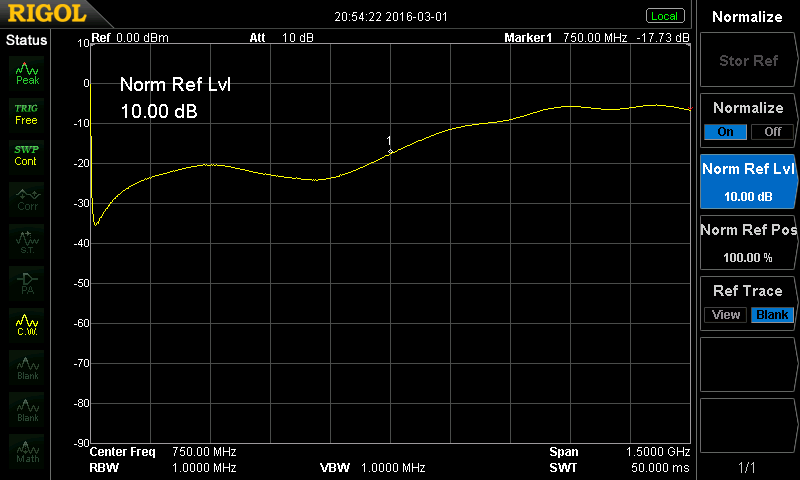
DC-1GHz まで使える (1.15以下 (DC-800MHz) 1.20以下 (800-1000MHz) というスペックですが、1.15=23.13dB / 1.20=20.83dB なのでスペック通りの測定はできてない感じです。
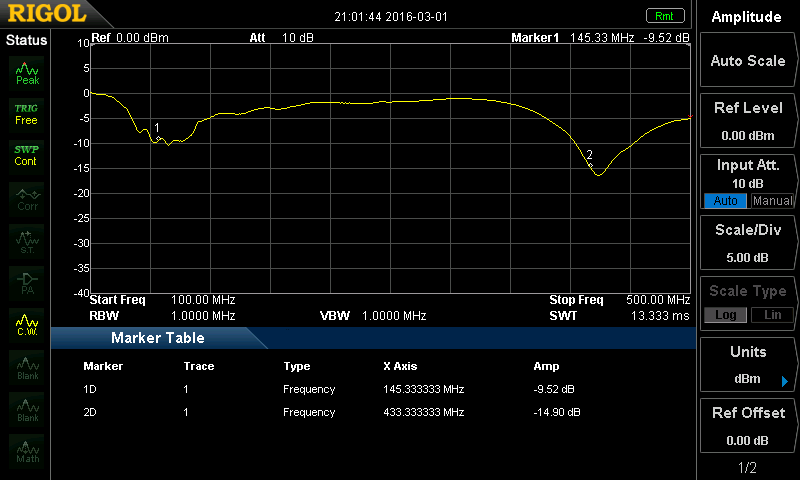
144MHz/430MHz 帯用のホイップアンテナです。1/4λなので人体アースしながら測っています。アースしないと全然違う帯域に同調していました。
ベランダに設置してあるホイップです。最近調整してませんが… 2014年の10月あたりの記録はこれです 500 Can't connect to lowreal.net:443 (certificate verify failed)
なぜかちょっとずつズレているようにみえます。
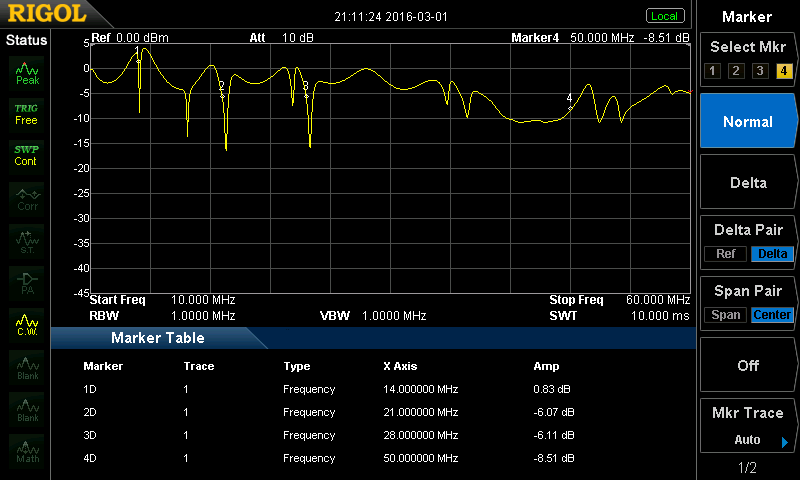
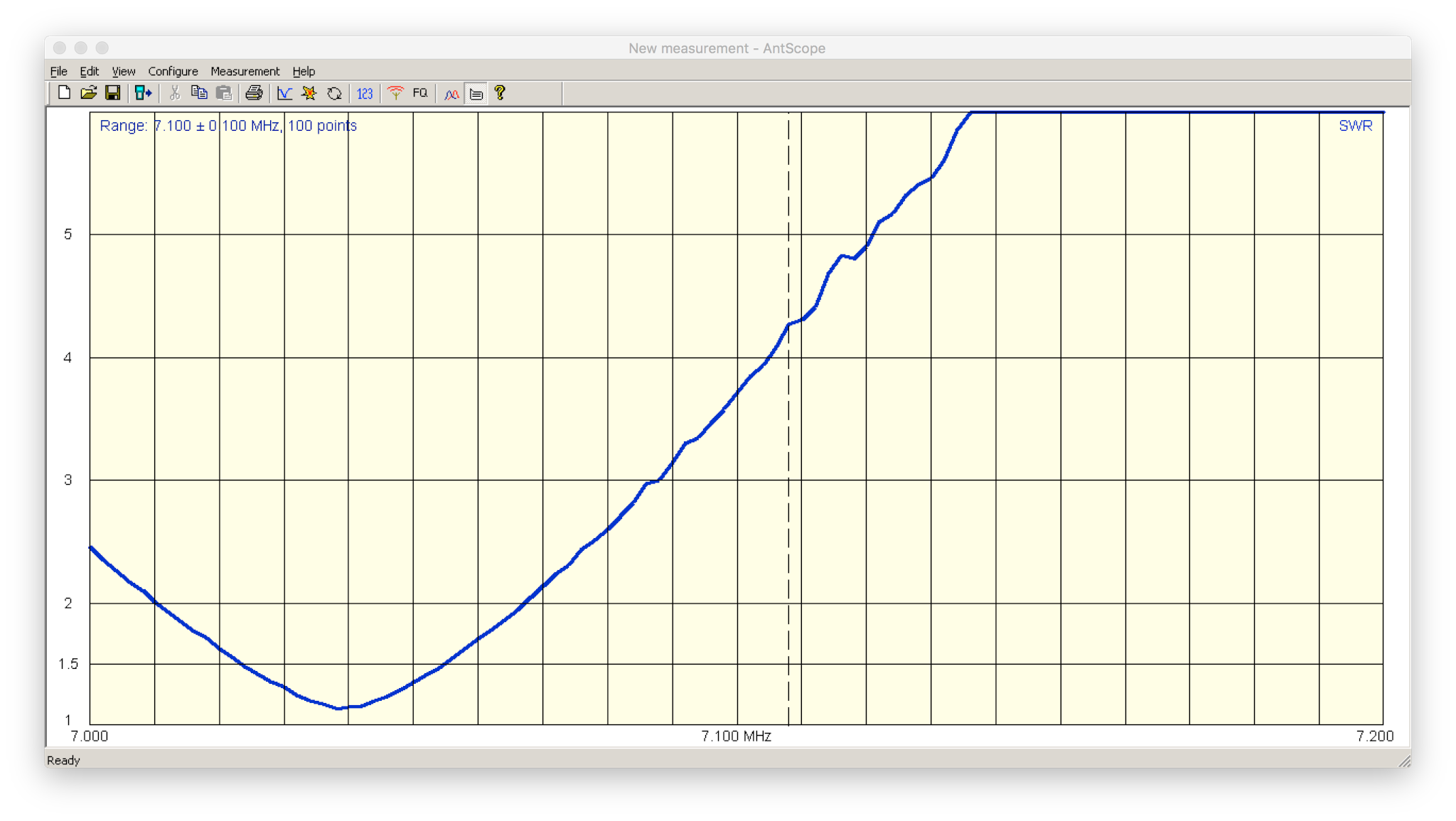
ちなみに DSA815 には VSWR モードがあって、実はリターンロスからVSWR換算を自動でやってくれます。これを使って 21MHz 帯を見てみました。

7MHz も見てみました。

アンテナアナライザーでも測ってみました。
リターンロスブリッジを使えばTG付きのスペクトラムアナライザーはスカラー型のネットワークアナライザと似た機能を持つようになります。しかし位相は測れないので決してベクター型ネットワークアナライザの代わりはできません。
アンテナアナライザーはベクター型ネットワークアナライザのアンテナ特化版です。(ベクター型ではないアンテナアナライザーもありますが…) なので R + jX を分けて表示することができ、
という原因をわけて解析することができます。
50MHz 帯まではアンテナアナライザーがあるのでスペアナでリターンロスを測る機会はまずなさそうです。しかしそれ以上高い周波数ではスペアナ+リターンロスブリッジが活躍できそうです。
![]()
![]()
![]()
OCXO の VFC ピンでの可変範囲を GPS の 1PPS を使って調べた | tech - 氾濫原 でとりあえず可変範囲ぐらいはわかったので、半固定抵抗を使ってだいたい10MHzぐらいにあわせてみたいと思います。
でもって、回路やコードの構成を変えました。
前回は mbed デフォルト (内蔵の12MHz CRクロックを逓倍した48MHz) でやっていました。別にこれでもいいのですが、せっかく高精度な 10MHz があるのに、これをクロックにしないのももったいないなという感じになりました。
それに、LPC1114 自体のクロック源をOCXOにすれば、内蔵カウンタでフリーランさせた値がそのまま周波数カウントになるので、GPIOを1ピン節約できます。
つまり 10MHz 5逓倍で 50MHz にして LPC1114 最大クロックで動かしてみたいと思います。OCXO の周波数カウントは5分周すれば元の10MHzになりそうです。
用語ですが「システムオシレータ」と「システムクロック」に区別があって、システムオシレータは外部水晶発振子を使うことを想定した内蔵発振回路、システムクロックはシステムオシレータまたはBYPASSされた外部クロックを指しています。
まず OCXO は発振器なので、内蔵システムオシレータは使わないようにします。
ドキュメントを見るわけですが、システムオシレータコントロールレジスタ (SYSOSCCTRL) の BYPASS が日本語版だと間違っているので原文を見る必要があります。
Bypass enabled. PLL input (sys_osc_clk) is fed directly from the XTALIN pin bypassing the oscillator. Use this mode when using an external clock source instead of the crystal oscillator.
となっていて、XTALIN から直接クロックを入力する場合には、内蔵のシステムオシレータをバイパスするという意味になります。
まぁとにかく XTALIN には外部クロックを直接入れれば良いのですが (XTALOUT はフロート)、ここで罠があります。XTALIN は他のピンと違って 1.8V 以上入力してはならないことになっています。
5V クロックなら 5.6k / 2.4k、3.3V クロックなら 1.2k / 1k あたりの分圧が必要です。
ただ、どうも OCXO の出力そのままだとうまく分圧できなかったので、一旦バッファ (74HCU04しかなかったのでこれで…) で受けてからクロック入力に使いました。
ぶっちゃけかなりハマりました。デバッグするためには CLKOUT を有効にして、どの段階までちゃんと出力が出ているかを確認する必要があります。
レジスタ自体はデータシート通りに記述すれば良いのですが、関連レジスタがかなり多いのでたいへんです……
ちょっとハマったのは SYSPLLCTRL の MSEL が実際の分周数-1を設定する必要がありました。(データシートにももちろん書いてありますが…)
やってることは
という感じです。
void set_system_clock_to_external_10mhz() {
#ifdef DEBUG_CLOCK
// XXX: set CLKOUT to debug (dp24)
LPC_IOCON->PIO0_1 = (0b001<<0/*FUNC=CLKOUT*/);
LPC_SYSCON->CLKOUTCLKSEL = 0b11; /*0b00=IRC, 0b01=SysOsc, 0b10=WDT, 0b11=Main*/
LPC_SYSCON->CLKOUTDIV = 1;
LPC_SYSCON->CLKOUTUEN = 0;
LPC_SYSCON->CLKOUTUEN = 1;
#endif
// Power down config (irc=on, sysosc=on)
LPC_SYSCON->PDRUNCFG &= ~(
(1<<0/*IRCOUT_PD*/) |
(1<<1/*IRC_PD*/)
);
// Ensure clock source to internal in temporary
LPC_SYSCON->MAINCLKSEL = 0b00;
LPC_SYSCON->MAINCLKUEN = 0x00;
LPC_SYSCON->MAINCLKUEN = 0x01;
while ( (LPC_SYSCON->MAINCLKUEN & 0b1) == 0);
// Power down config (syspll=off, sysosc=off)
LPC_SYSCON->PDRUNCFG |= (
(1<<5/*SYSOSC_PD*/) |
(1<<7/*SYSPLL_PD*/)
);
// Set System OSC = BYPASS (clock fed to XTALIN directly 1.8V / XTALOUT must be floating)
LPC_SYSCON->SYSOSCCTRL = (1<<0/*BYPASS*/);
// PLL Clock Source = System OSC
LPC_SYSCON->SYSPLLCLKSEL = (0b01<<0/*SEL*/);
// Update PLL Source
LPC_SYSCON->SYSPLLCLKUEN = 0;
LPC_SYSCON->SYSPLLCLKUEN = 1;
while ( (LPC_SYSCON->SYSPLLCLKUEN & 0b1) == 0 );
// Set PLL
// M = F_clkout / F_clkin
// FCCO = 2 * P * F_clkout (P = {1, 2, 4, 8}) (FCCO=156-320MHz)
// F_clkout = 50MHz / M = 5 / P = 2 / FCCO = 200MHz
LPC_SYSCON->SYSPLLCTRL = ( (5 - 1)<<0/*MSEL*/) | (0b01<<5/*PSEL*/);
// Power down config (syspll=on)
LPC_SYSCON->PDRUNCFG &= ~(
(1<<7/*SYSPLL_PD*/)
);
// Wait for PLL Lock
while ( (LPC_SYSCON->SYSPLLSTAT & 0b1) == 0 );
// Update Main Clock to PLL Output
LPC_SYSCON->MAINCLKSEL = 0b11;
LPC_SYSCON->MAINCLKUEN = 0x00;
LPC_SYSCON->MAINCLKUEN = 0x01;
while ( (LPC_SYSCON->MAINCLKUEN & 0b1) == 0);
// Power down config (irc=off)
LPC_SYSCON->PDRUNCFG |= (
(1<<0/*IRCOUT_PD*/) |
(1<<1/*IRC_PD*/)
);
SystemCoreClock = 50000000;
}
タイマーをタイマーとして使い、システムクロックをそのままカウントします。キャプチャピンはGPS1PPSをキャプチャするようにし、キャプチャのタイミングでキャプチャレジスタにタイマカウンタをコピー(ハードウェア動作)させて割込みを生成します。GPIO のピンチェンジ割込みは使いません。
レジスタの設定は問題ないのですが、割込み周りでだいぶハマりました。
また、前回よりも精度を高めるため、10秒、100秒、1000秒のゲートでの誤差を表示するようにしました。dHz (デシヘルツ) cHz (センチヘルツ) mHz (ミリヘルツ) 単位で表示しているのが誤差の項目です。

±1カウントエラーがあるので、多少 +1/-1 がでることがあります。
1000秒単位での調整は面倒なので、10秒単位の調整しかしてませんが、このように手で雑に調整してもこのぐらいの精度が出ていました。
LPC1114 はSRAMが4KBと少ないため、カウントされた値をそのまま持つのではなく、誤差を signed で持つようにしています。そもそもOCXOの可変範囲が±5Hz程度しかないので、それ以上の情報を持つ必要がありません。ということで int8_t の配列で履歴を持って、直近のn件を合計して見る形になっています。
これにより、例えばカウンタをそのまま持つには10Mは16bitに納まらないので32bitの配列にしなければなりませんが、誤差だけを保持すれば4分の1の容量ですみます。というか uint32_t だとLPC1114では1000個の履歴を持てません。
constexpr uint32_t CLOCK = 10000000;
constexpr uint16_t HISTORY = 1000;
int8_t errors[HISTORY];
uint16_t error_index = 0;
uint16_t error_count = 0;
volatile bool updated = 0;
Serial serial(USBTX, USBRX);
extern "C" void TIMER32_0_IRQHandler (void) {
static uint32_t prev = 0;
uint32_t count = LPC_TMR32B0->CR0;
uint32_t pps_counter;
if (prev < count) {
pps_counter = count - prev;
} else {
// overflowed
pps_counter = (0xffffff - prev) + count + 1;
}
prev = count;
int16_t error = static_cast<int32_t>(CLOCK) - static_cast<int32_t>(pps_counter);
if (abs(error) < 15) {
error_index = (error_index + 1) % HISTORY;
errors[error_index] = error;
if (error_count < HISTORY) {
error_count++;
}
updated = 1;
}
LPC_TMR32B0->IR = (1<<4/*CR0 Interrupt*/);
}
int main() {
set_system_clock_to_external_10mhz();
NVIC_EnableIRQ(TIMER_32_0_IRQn);
// enable 32bit counter
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<9/*CT32B0 32bit counter clock*/);
// Capture pin dp14 (for gps 1pps)
LPC_IOCON->PIO1_5 |= (0b010<<0/*FUNC=CT32B0_CAP0*/);
// Match output (not used)
// LPC_IOCON->PIO1_6 |= (0b010<<0/*FUNC=CT32B0_MAT0*/);
// LPC_IOCON->PIO1_7 |= (0b010<<0/*FUNC=CT32B0_MAT1*/);
// LPC_IOCON->PIO0_1 |= (0b010<<0/*FUNC=CT32B0_MAT2*/);
// LPC_IOCON->R_PIO0_11 |= (0b011<<0/*FUNC=CT32B0_MAT3*/);
// Prescaler
LPC_TMR32B0->PR = 4;
// Capture on CAP0 Rising Edge (to CR0) and Enable Interrupt
LPC_TMR32B0->CCR =
(1<<0/*CAP0RE*/) |
(1<<2/*CAP0I*/);
LPC_TMR32B0->MCR = 0;
LPC_TMR32B0->CTCR = (0b00<<0/*Counter/Timer Mode=Timer*/);
LPC_TMR32B0->TCR = (1<<0/*Counter Enable*/);
serial.baud(115200);
for (;;) {
if (updated) {
updated = 0;
serial.printf("[%d] last: %+d\n", error_count, errors[error_index]);
if (error_count >= 10) {
int32_t sum = 0;
for (int i = 0; i < 10; i++) {
sum += errors[ (error_index + HISTORY - i) % HISTORY ];
}
serial.printf("[%d] %+ddHz\n", error_count, sum);
}
if (error_count >= 100) {
int32_t sum = 0;
for (int i = 0; i < 100; i++) {
sum += errors[ (error_index + HISTORY - i) % HISTORY ];
}
serial.printf("[%d] %+dcHz\n", error_count, sum);
}
if (error_count >= 1000) {
int32_t sum = 0;
for (int i = 0; i < 1000; i++) {
sum += errors[ (error_index + HISTORY - i) % HISTORY ];
}
// 1000_0000000
serial.printf("[%d] %+dmHz\n", error_count, sum);
}
}
}
}
![]()
![]()
![]()
VFC を PWM によるデジタルコントロールにしてみました。
前回は多回転ボリュームを使って手動で調整をしました。これだと10秒単位ぐらいならともかく、1000秒単位の調整は面倒くさすぎてやっていられません。のでここをMCUで自動化します。
OCXO から出ている Vref を PWM でスイッチングしてローパスフィルタにかけてコントロール電圧を生成します。DAC デバイスの電源電圧を Vref にするという形でもよさそうですが手元に DAC デバイスがないので PWM でやっています。
PWM の周波数は約30Hzです。これは mbed の PwmOut の period_us() に int の最大値 (1<<15) を設定した値になります。(なんでこのAPIはintなんでしょうかね?)
これにより、int16_t 変数でパルス幅を保持して、pulsewidth_us() が最大の分解能を持つようにしています。
PWMの周波数が30Hzぐらいなので、外部フィルタとしてかなり低い周波数のローパスフィルタを使っています。応答性が高くてもあまり意味がないないし困るので1Hzぐらいのローパスフィルタでも良さそうです。
また、PWM 周波数を変えた直後はグリッチが発生するので、2秒間のGPS1PPS割込みを無視するようなコードを加えました。
PID制御などではなく、まずは適当にインクリメント・デクリメントし続けるような実装にしました。
当然 PID 制御したほうがいいのですが、とりあえず頭を使いたくなかったので…
シリアルに出している直近1000秒ごとの誤差合計を、雑なワンライナーで整形して Google Spreadsheet でグラフ化してみました。主にソフトウェア的要因と思われる過補正を繰替えしている雰囲気を感じられますが、概ね±10mHz(±1ppb)におさまっています。
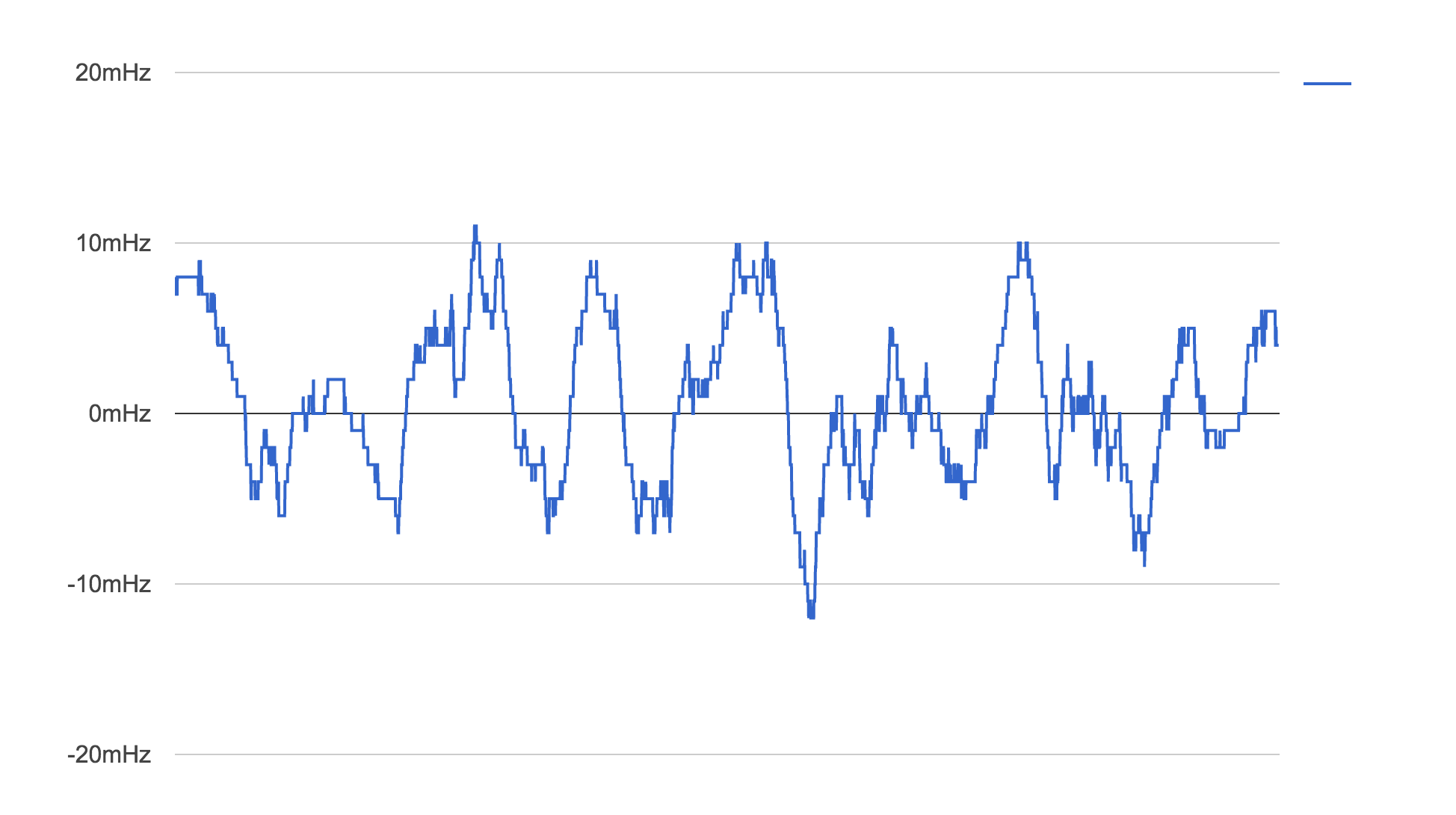
調整を自動化したので、これはもはやGPSDOと呼べそうです。PID制御にするなど、ソフトウェア的な制御改良の余地はありますが、GPSDOの大枠が実装できました。
どちらかといえばあとはアナログ回路の要素が多くなります。といっても以下らへんを実装すれば実用的になりそうです。
アナログまわりが勉強中なので現状の技術力だと難しい面もありますが、製作例もあるのでなんとかはなりそうです。とはいえ、作っても現状だと応用先がスペアナぐらいしかないので、あんまりやる気がありません。
かなり簡単な構成でppbオーダーの高精度なクロックが得られるのは面白いです。もうちょっとアナログ回路の技術力があればさくっと作りあげられそうです。
#include "mbed.h"
#include <stdint.h>
#include <inttypes.h>
void set_system_clock_to_external_10mhz() {
#ifdef DEBUG_CLOCK
// XXX: set CLKOUT to debug (dp24)
LPC_IOCON->PIO0_1 = (0b001<<0/*FUNC=CLKOUT*/);
LPC_SYSCON->CLKOUTCLKSEL = 0b11; /*0b00=IRC, 0b01=SysOsc, 0b10=WDT, 0b11=Main*/
LPC_SYSCON->CLKOUTDIV = 1;
LPC_SYSCON->CLKOUTUEN = 0;
LPC_SYSCON->CLKOUTUEN = 1;
#endif
// Power down config (irc=on, sysosc=on)
LPC_SYSCON->PDRUNCFG &= ~(
(1<<0/*IRCOUT_PD*/) |
(1<<1/*IRC_PD*/)
);
// Ensure clock source to internal in temporary
LPC_SYSCON->MAINCLKSEL = 0b00;
LPC_SYSCON->MAINCLKUEN = 0x00;
LPC_SYSCON->MAINCLKUEN = 0x01;
while ( (LPC_SYSCON->MAINCLKUEN & 0b1) == 0);
// Power down config (syspll=off, sysosc=off)
LPC_SYSCON->PDRUNCFG |= (
(1<<5/*SYSOSC_PD*/) |
(1<<7/*SYSPLL_PD*/)
);
// Set System OSC = BYPASS (clock fed to XTALIN directly 1.8V / XTALOUT must be floating)
LPC_SYSCON->SYSOSCCTRL = (1<<0/*BYPASS*/);
// PLL Clock Source = System OSC
LPC_SYSCON->SYSPLLCLKSEL = (0b01<<0/*SEL*/);
// Update PLL Source
LPC_SYSCON->SYSPLLCLKUEN = 0;
LPC_SYSCON->SYSPLLCLKUEN = 1;
while ( (LPC_SYSCON->SYSPLLCLKUEN & 0b1) == 0 );
// Set PLL
// M = F_clkout / F_clkin
// FCCO = 2 * P * F_clkout (P = {1, 2, 4, 8}) (FCCO=156-320MHz)
// F_clkout = 50MHz / M = 5 / P = 2 / FCCO = 200MHz
LPC_SYSCON->SYSPLLCTRL = ( (5 - 1)<<0/*MSEL*/) | (0b01<<5/*PSEL*/);
// Power down config (syspll=on)
LPC_SYSCON->PDRUNCFG &= ~(
(1<<7/*SYSPLL_PD*/)
);
// Wait for PLL Lock
while ( (LPC_SYSCON->SYSPLLSTAT & 0b1) == 0 );
// Update Main Clock to PLL Output
LPC_SYSCON->MAINCLKSEL = 0b11;
LPC_SYSCON->MAINCLKUEN = 0x00;
LPC_SYSCON->MAINCLKUEN = 0x01;
while ( (LPC_SYSCON->MAINCLKUEN & 0b1) == 0);
// Power down config (irc=off)
LPC_SYSCON->PDRUNCFG |= (
(1<<0/*IRCOUT_PD*/) |
(1<<1/*IRC_PD*/)
);
SystemCoreClock = 50000000;
}
constexpr uint32_t CLOCK = 10000000;
constexpr uint16_t HISTORY = 1000;
int8_t errors[HISTORY];
uint16_t error_index = 0;
uint16_t error_count = 0;
volatile bool updated = 0;
volatile uint8_t skip_second = 0;
Serial serial(USBTX, USBRX);
PwmOut osc_control(dp1);
extern "C" void TIMER32_0_IRQHandler (void) {
static uint32_t prev = 0;
LPC_TMR32B0->IR = (1<<4/*CR0 Interrupt*/);
uint32_t count = LPC_TMR32B0->CR0;
uint32_t pps_counter;
if (prev < count) {
pps_counter = count - prev;
} else {
// overflowed
pps_counter = (0xffffff - prev) + count + 1;
}
prev = count;
if (skip_second > 0) {
skip_second--;
return;
}
int16_t error = static_cast<int32_t>(pps_counter) - static_cast<int32_t>(CLOCK);
if (abs(error) < 15) {
error_index = (error_index + 1) % HISTORY;
errors[error_index] = error;
if (error_count < HISTORY) {
error_count++;
}
updated = 1;
}
}
int16_t pulsewidth = 16500;
void vcf_plus(uint8_t count) {
pulsewidth -= count;
osc_control.pulsewidth_us(pulsewidth);
skip_second = 2;
serial.printf("osc_control = %d\n", pulsewidth);
}
void vcf_minus(uint8_t count) {
pulsewidth += count;
osc_control.pulsewidth_us(pulsewidth);
skip_second = 2;
serial.printf("osc_control = %d\n", pulsewidth);
}
int main() {
set_system_clock_to_external_10mhz();
NVIC_EnableIRQ(TIMER_32_0_IRQn);
osc_control.period_us(1<<15);
osc_control.pulsewidth_us(pulsewidth);
// enable 32bit counter
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<9/*CT32B0 32bit counter clock*/);
// Capture pin dp14 (for gps 1pps)
LPC_IOCON->PIO1_5 |= (0b010<<0/*FUNC=CT32B0_CAP0*/);
// Match output (not used)
// LPC_IOCON->PIO1_6 |= (0b010<<0/*FUNC=CT32B0_MAT0*/);
// LPC_IOCON->PIO1_7 |= (0b010<<0/*FUNC=CT32B0_MAT1*/);
// LPC_IOCON->PIO0_1 |= (0b010<<0/*FUNC=CT32B0_MAT2*/);
// LPC_IOCON->R_PIO0_11 |= (0b011<<0/*FUNC=CT32B0_MAT3*/);
// Prescaler
LPC_TMR32B0->PR = 4;
// Capture on CAP0 Rising Edge (to CR0) and Enable Interrupt
LPC_TMR32B0->CCR =
(1<<0/*CAP0RE*/) |
(1<<2/*CAP0I*/);
LPC_TMR32B0->MCR = 0;
LPC_TMR32B0->CTCR = (0b00<<0/*Counter/Timer Mode=Timer*/);
LPC_TMR32B0->TCR = (1<<0/*Counter Enable*/);
serial.baud(115200);
for (;;) {
if (serial.readable()) {
char c = serial.getc();
serial.putc(c);
serial.printf(" %d\n", c);
if (c == '+' || c == 'p') {
vcf_plus(100);
} else
if (c == '-' || c == 'm') {
vcf_minus(100);
}
}
if (updated) {
updated = 0;
int8_t last = errors[error_index];
serial.printf("[%d] last: %+d\n", error_count, last);
if (last >= 2) {
vcf_minus(1);
} else
if (last <= -2) {
vcf_plus(1);
}
if (error_count >= 10) {
int32_t sum = 0;
for (int i = 0; i < 10; i++) {
sum += errors[ (error_index + HISTORY - i) % HISTORY ];
}
serial.printf("[%d] %+ddHz\n", error_count, sum);
if (sum >= 2) {
vcf_minus(1);
} else
if (sum <= -2) {
vcf_plus(1);
}
}
if (error_count >= 100) {
int32_t sum = 0;
for (int i = 0; i < 100; i++) {
sum += errors[ (error_index + HISTORY - i) % HISTORY ];
}
serial.printf("[%d] %+dcHz\n", error_count, sum);
if (sum >= 2) {
vcf_minus(1);
} else
if (sum <= -2) {
vcf_plus(1);
}
}
if (error_count >= 1000) {
int32_t sum = 0;
for (int i = 0; i < 1000; i++) {
sum += errors[ (error_index + HISTORY - i) % HISTORY ];
}
// 1000_0000000
serial.printf("[%d] %+dmHz\n", error_count, sum);
if (sum >= 2) {
vcf_minus(1);
} else
if (sum <= -2) {
vcf_plus(1);
}
}
}
}
}
![]()
![]()
![]()
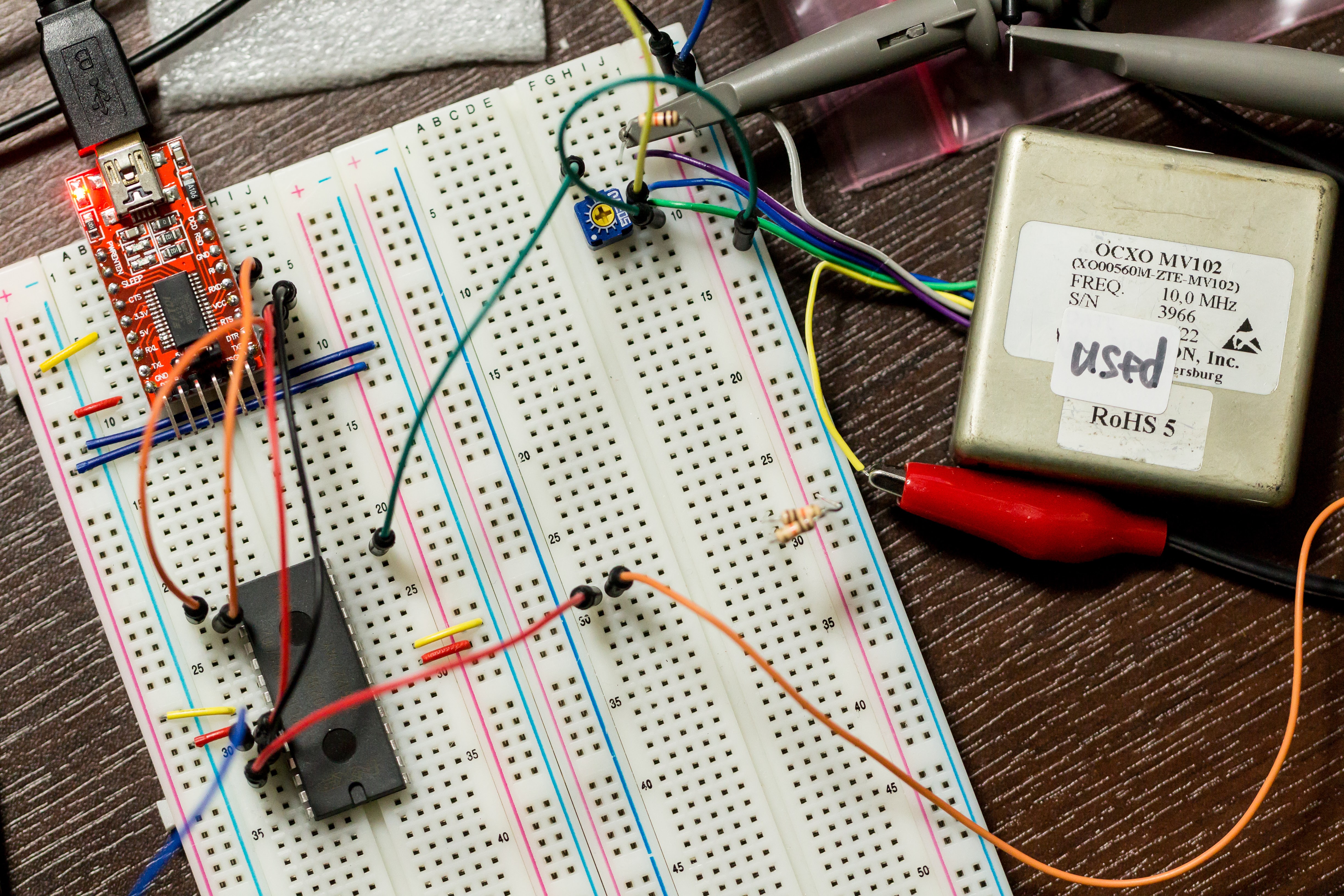
ebay で注文した OCXO が届いたのでテストしてみました。このぐらいの小さな OCXO です。
出力は HCMOS 矩形波 (10kΩ 39pF 負荷) となっています。正弦波出力が欲しかったのですが間違えて買ってしまいました。バッファしてフィルタすればいい気はします。とりあえずデジタル回路に直結でき、軽くテストするには便利なのでこれはこれで良いことにします。
GND Us RF Uref Uin
というピンアサインになっています。Us は +12V入力、RF は出力、Uref はリファレンス電圧(5V)、Uin はVCOの入力のようです。
Uin には 0〜5V で入力し、これにより±4e-7 (±4Hz) 調整できるというスペックです。
とりあえず 12V 加えるだけで 10MHz の出力が得られます。約 200mA ぐらい (2.5W程度) の消費電力があります。2時間ぐらい通電してみましたが特に下がりませんでした。クソ寒い部屋でやっているせいかもしれませんが…
OCXO なので結構熱くなります。しばらく触っていられるぐらいなので45〜55℃ぐらいでしょうか…
GPSモジュールはこの前試した NEO-6Mです。3pin から線を別途引き出して使っています。窓際でやっているので、あまり安定した受信とはいえませんが、3D Fix したタイミングで計ってみました。
MPU として LPC1114FN28 を使って、以下のようなコードを書きました。ハードウェアカウンタは mbed の API からは使えるようになっていないので、データシートを読む必要があります。
本当は、ハードウェアでカウントしつつ、1PPS シグナルのキャプチャ信号でカウンタをキャプチャレジスタに自動的に入れて、同時に割込みを発生させてその値を読み出すみたいにしたかったのですが、少なくとも LPC1114 においてはそういうことはできないようでした (2つ以上のキャプチャピンを持っていない・外部入力カウンタとして使う場合、キャプチャレジスタを使用することはできない)
なので、実際のコードでは 32bit のカウンタを外部入力(10MHz)でフリーランカウントさせ、GPS の1PPSのタイミングでカウンタの値を読みこんで、前回との差分をとって周波数を求めています。
1PPS ごとの表示なので、簡単なコードですが、GPS同期の正確なゲート時間1秒周波数カウンタとして動いています。
#include "mbed.h"
#include <stdint.h>
constexpr uint32_t CLOCK = 10000000;
constexpr uint16_t HISTORY = 1000;
int16_t errors[HISTORY];
uint16_t error_index = 0;
uint16_t error_count = 0;
volatile bool updated = 0;
Serial serial(USBTX, USBRX);
InterruptIn gps1pps(dp25);
int main() {
// enable 32bit counter
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<9/*CT32B0 32bit counter clock*/);
// Capture pin dp14
LPC_IOCON->PIO1_5 |= (0b010<<0/*FUNC=CT32B0_CAP0*/);
// Match output (not used)
// LPC_IOCON->PIO1_6 |= (0b010<<0/*FUNC=CT32B0_MAT0*/);
// LPC_IOCON->PIO1_7 |= (0b010<<0/*FUNC=CT32B0_MAT1*/);
// LPC_IOCON->PIO0_1 |= (0b010<<0/*FUNC=CT32B0_MAT2*/);
// LPC_IOCON->R_PIO0_11 |= (0b011<<0/*FUNC=CT32B0_MAT3*/);
LPC_TMR32B0->PR = 0;
LPC_TMR32B0->CCR = 0;
LPC_TMR32B0->CTCR =
(0b01<<0/*Counter/Timer Mode=Counter, Rising Edge*/) |
(0b00<<2/*Count Input Select*/);
LPC_TMR32B0->TCR = (1<<0/*Counter Enable*/);
gps1pps.rise([]{
static uint32_t prev = 0;
uint32_t count = LPC_TMR32B0->TC;
uint32_t pps_counter;
if (prev < count) {
pps_counter = count - prev;
} else {
// overflowed
pps_counter = (0xffffff - prev) + count + 1;
}
prev = count;
serial.printf("pps_counter: %lu\n", pps_counter);
int16_t error = static_cast<int32_t>(CLOCK) - static_cast<int32_t>(pps_counter);
error_index = (error_index + 1) % HISTORY;
errors[error_index] = error;
if (error_count < HISTORY) {
error_count++;
}
updated = 1;
});
// NVIC_SetPriority();
serial.baud(115200);
for (;;) {
if (updated) {
updated = 0;
// serial.printf("last: %d\n", errors[error_index]);
//
// uint32_t sum = 0;
// for (int i = 0; i < error_count; i++) {
// sum += errors[ (error_index + HISTORY - i) % HISTORY ];
// }
// uint32_t error = sum * 1000 / error_count;
// serial.printf("sum(%ds): %d\n", error_count, error);
}
}
} VFC 端子を 0V〜5V まで可変させて周波数を読んでみました。仕様上は の調整範囲 (±4Hz) があると書いてありました。実際やってみると以下のように ±5Hz ぐらいの可変ができるようです。
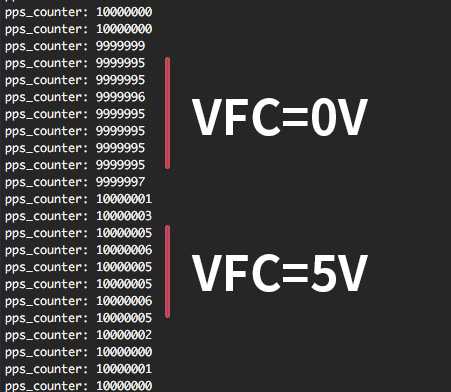
0〜5V の範囲で10Hz可変なので、2 Hz/V、2mHz/mV です。DAC で 1mHz 単位ぐらいで電圧を設定するなら、最低でも14bit程度の精度が必要そうです。
![]()
![]()
![]()
答: デフォルトではしない
ARMのNVIC (Nested Vector Interrupt Controller) は名前の通りネスト可能ですが、実行中の処理よりも優先順位が高いものだけがネストします(ネストとは割り込み処理中にさらに割り込みが発生すること)。
mbed の場合、優先度を設定するAPIはないため、全割り込みは同一優先順位となり、他の割り込みがネストすることはありません (ライブラリ側でやってる場合を除く)。
もし優先順位をつけてネスト可能にする場合、CMSIS(ARM規定のAPI群)のAPI (NVIC_SetPriority()) を使えば可能です。ただ、このAPIを使うためには、mbedのどのAPIでどんな割り込みを設定しているかを把握している必要があります (mbed 側のコードを全部読む必要がある)。
優先順位は0から3までの4段階あり、0が最も優先です。
デフォルトでは全ての割り込みが0に設定されているので、相互に割り込みがネストすることはなく、通常処理が動いている間だけ割り込みが発生します。
また、通常処理についても、__disable_irq() を呼ぶと一時的に優先度0のコードになり、割り込みが発生しなくなります。__enable_irq() で元の優先度に戻ります。
割り込み発生から、次の割り込みまでの間に2回ピン変化が起こると、2つめの変化による割り込み情報は失われます。
ある割り込みを優先した場合、その割り込みと同じ優先度の割り込み(その割り込み自身を含む)の処理時間だけ考えればいいことになります。
![]()
![]()
![]()
2013年の3月に買ったルンバをオフィシャルメンテナンスに出しました。約3年ぐらい、平日は毎日稼動させていました。
最近どうもガタガタ、ガタガタと言うときがあり、調べてみると後退したり旋回するときに、片方のモーターが動いていないような挙動でした。前進のときは問題なく、特定の場合だけなります。
一応一通り分解して清掃はしてみましたが、おそらく一番の原因であろうタイヤユニットまわりは中まで分解できるようになっておらず、他全てを綺麗にしても直りませんでした。
この時点では2つの選択肢がありました。
前進は大丈夫で後退だけがダメ、なおかつ片方だけという状態だったので、なんとなく内部のDCモータードライバ回路の一部がおかしいのではないかという疑いもありました。もしそうならタイヤユニットを買っても無駄になってしまいます。
ということで自力で頑張るのは早々に諦めてオフィシャルメンテナンスに出しました。
(途中で「バッテリーもヘタっているから変えるか? 変えるなら18000円のプランになるが良いか?」という趣旨の電話がありました。差額が5000円なので、まぁどうせだからと思い18000円のプランに変えました。オフィシャルバッテリはそもそも10000円ぐらいするので差額5000円なら互換品なみに安い)
返ってきたルンバは全体的に綺麗になっていました。メンテナンスの結果のレポートによると
という感じで、ダストボックスと本体以外ほとんど全部変わってました。内部基板ユニットの不具合がやはりあったみたいで(モータードライバかどうかはわかりませんが)、自力でどうにかできる範囲ではなかったので今回に関しては判断は正しかったようです。
バッテリの寿命も伸びたみたいなので、とりあえずこれであと2年ぐらいは元気に動いてくれることを期待します。
メンテナンス費用には送料も含まれています。だいたい往復で3000円ぐらいかかるとすると、約10000円(ブラシパック)/15000円(サービスパック)が実際の工費になります。

メインブラシ及びエッジクリーニングブラシが約1500円

フィルタが1セットあたり約600円
はブラシパックの場合必ず交換、サービスパックの場合は必要に応じて交換

もし壊れているなら上のようなモジュール(6000円〜)が交換

ルンバ用バッテリー 日本企業による販売365日保証 長寿命2倍 長時間稼働2.5時間 ルンバ500 600 700 800 900シリーズ対応 5bt_ao cho45
サービスパックの場合バッテリーが必ず交換 (↑これは互換品ですが)
ということで、単体として高いかというとそうでもなく、点検修理の工数を考えるとむしろお得ぐらいの価格設定です。
ただ、修理の場合実際あたまに浮かぶのは買い替えでしょう。別のルンバに買い替えるなら修理のほうが当然安くすみます。他社製品は今回検討しませんでしたが、もし安くていいのがあれば修理と競合しそうです。
![]()
![]()
![]()
any() 系のマッチャは常に「あらゆるオブジェクト」にマッチします。この挙動は Javadoc にも書いてあって、もしかすると将来的に変更するかも、みたいなことが書いてあります。
じゃあなんで any(Class) とか anyString() とかあるのか?という気持ちになるわけですが、これはたぶんオーバーロードで複数の選択肢がある場合に、ある特定のメソッドを確定するときに便利だからだ、と思います。
なお、あるクラスのインスタンスかどうかをチェックするマッチャは isA(Class clazz) のようです。
![]()
![]()
![]()
一定時間で何かをする、といえばタイマーの割込みを使うことでしょうが、タイマーを使いたくないないし使えないということもあると思います。
そういうときループをぶんまわしながら、時刻などを比較して一定時間ごとに処理をするという方法をとったりすることがあります。今回はそれを簡単に書けるスニペットを考えたという話です。
こういうことをするライブラリを調べてみると、Metro というのがあります。これは以下のようにして使うライブラリのようです。
Metro interval250 = Metro(250);
void loop() {
if (interval250.check()) {
// ここで 250msごとの処理
}
} もちろん悪くはないのですが、変数宣言と実際の処理が分かれており、余計な変数を宣言する必要があってなんか嫌です。(変数名をいちいち考えたくないという意味です)
そこで以下のようなスニペットを考えました。interval class が本体です。
template <uint16_t time>
class interval {
uint32_t next_run = 0;
template <class T>
void _run(T func) {
uint32_t now = millis();
if (next_run < now) {
func();
next_run = now + time;
}
}
interval() {}
public:
template <class T>
static void run(T func) {
static interval<time> instance;
instance._run(func);
}
};
void setup() {
Serial.begin(9600);
}
void loop() {
interval<250>::run([]{
Serial.println("250ms 1");
});
interval<250>::run([]{
Serial.println("250ms 2");
});
interval<1000>::run([]{
Serial.println("1000ms");
});
} loop() 内でいきなり適当な書きかたをするだけですみます。
事前準備 (グローバル変数やstatic変数を自力で宣言したり) をせず、いきなり静的な関数ないしメソッドを読んで使うことができるようにするため、以下のような感じになっています。
まず、interval クラスは time をテンプレート引数にとっているので、time ごとに別のクラスが作られます。
各 time を持つ interval クラスには、さらに引数 func の型をテンプレート引数にとる run() という static メソッドを持っています。
run() は内部で static 変数として interval
func には lambda 式を書くことを想定しています。lambda 式の型は書く度に違うものになるので、同じ time を持つ処理も複数書けます。
つまり、テンプレート引数を使うことで、グローバルな状態を複数作っています。自分で余計な変数を宣言せずに「状態」を持つためにはこのような小細工が必要なようです。
これにより、各 time と引数 func ごとに interval
![]()
![]()
![]()
FT82-43 に20ターンでやってみましたが、結果が芳しくありませんでした。
そこで、FT82-61 に 30 ターンという、おそらくこれが最善だろうと思われる組合せでやってみることにしました。昔に
FT82-61 (AL= 79) のほうが透磁率がちょうど良さそうだけど、手元になかった。
と書いていました。このとき実はコアを買って巻くところまではやったのですが、実際に換装するところまでやっていませんでした。1年ちょっと越しの挑戦です。
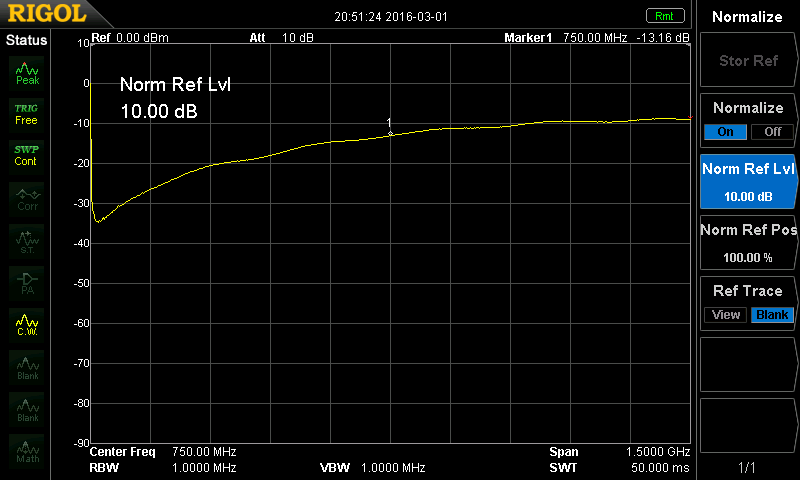
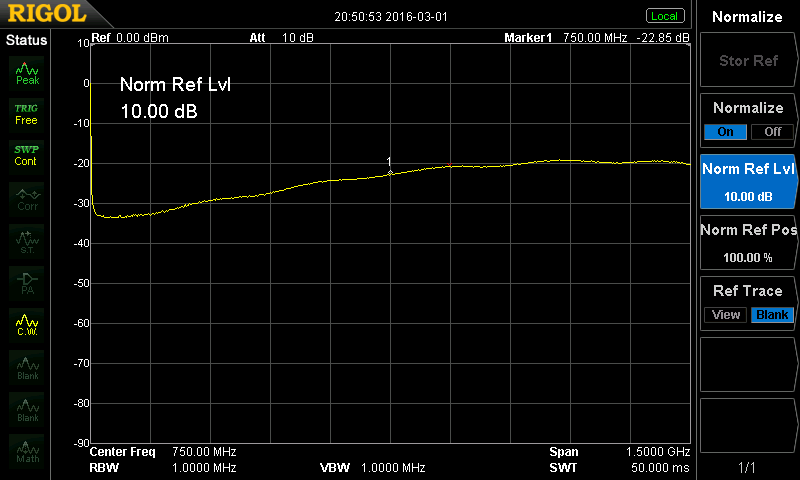
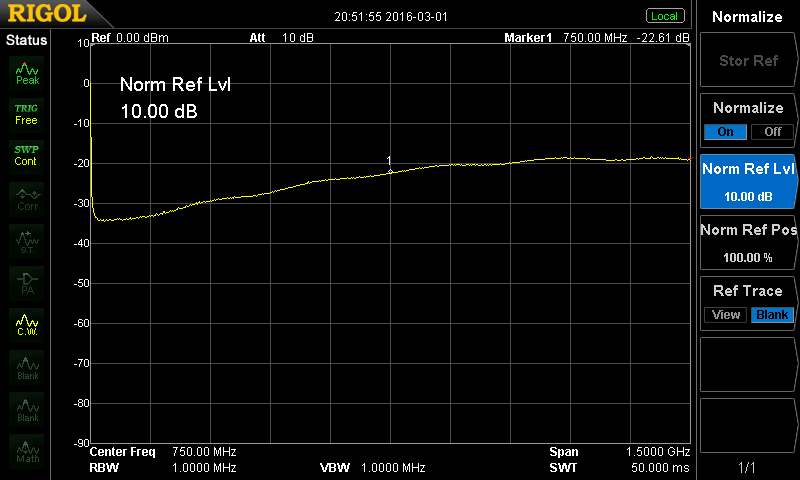
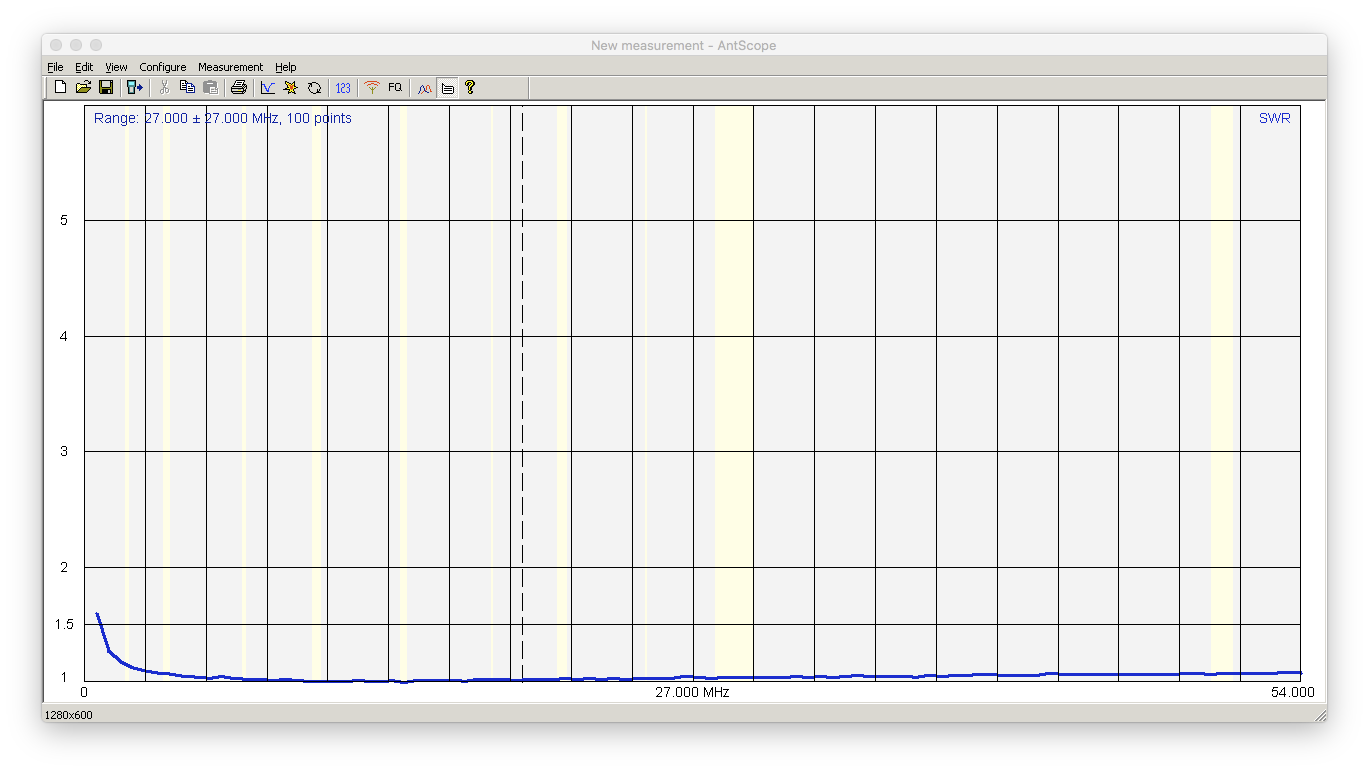
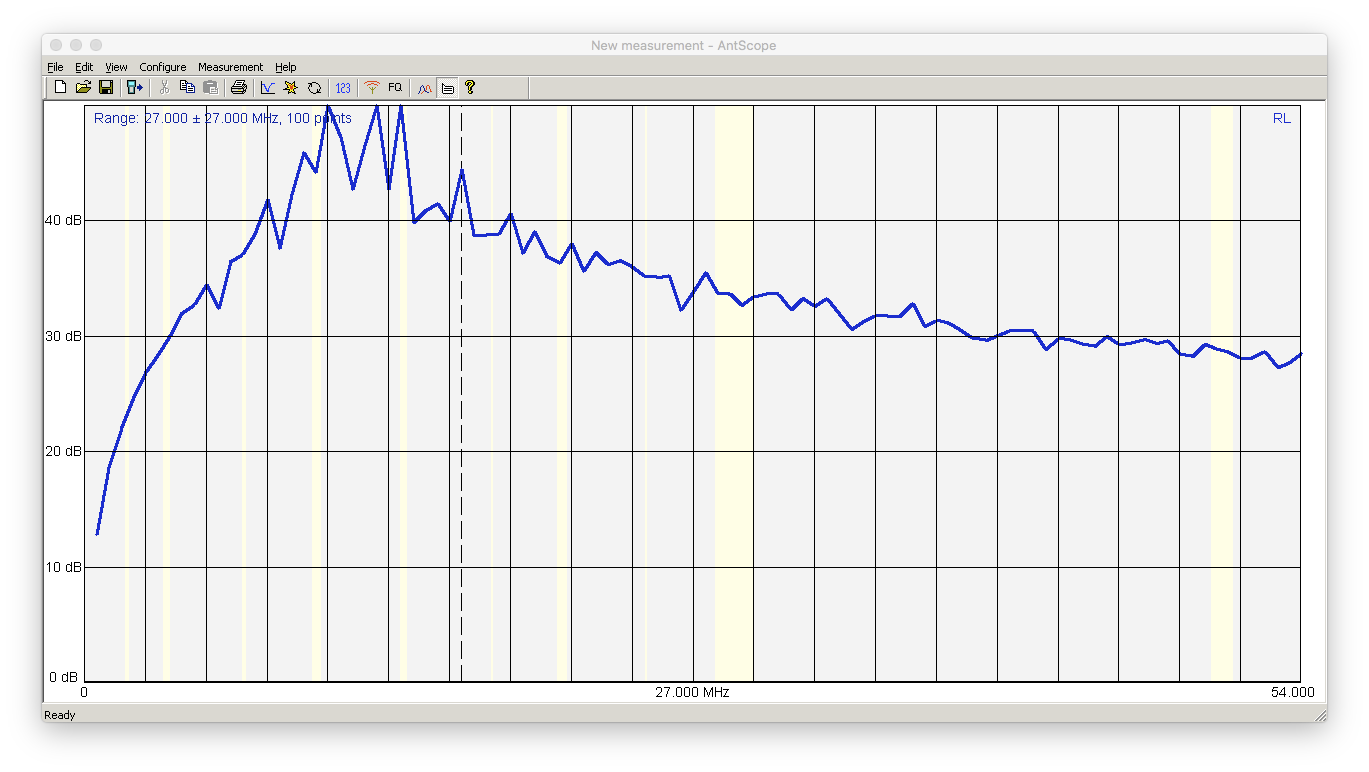
結合器自体の SWR/RL です。
全く問題ない感じです。

| FT82-43 T20 | ||||||||||||||
| 測定周波数 kHz | IN [V] | OUT [V] | FWD | REF | IN [W] | OUT [W] | FWD [W] | REF [W] | Insertion Loss | Coupling | Isolation | Directivity | ||
| 1910 | 51 | 51 | 2.490 | 0.060 | 52.02 | 52.02 | 0.124002 | 0.000072 | 0.00 | -26.23 | -58.59 | -32.36 | ||
| 7010 | 49 | 49 | 2.470 | 0.090 | 48.02 | 48.02 | 0.122018 | 0.000162 | 0.00 | -25.95 | -54.72 | -28.77 | ||
| 28010 | 52 | 53 | 2.700 | 0.278 | 54.08 | 56.18 | 0.145800 | 0.001546 | -0.17 | -25.69 | -45.44 | -19.75 | ||
| 50010 | 55 | 52 | 2.970 | 0.530 | 60.50 | 54.08 | 0.176418 | 0.005618 | 0.49 | -25.35 | -40.32 | -14.97 | ||
| FT82-61 T30 | ||||||||||||||
| 測定周波数 kHz | IN [V] | OUT [V] | FWD | REF | IN [W] | OUT [W] | FWD [W] | REF [W] | Insertion Loss | Coupling | Isolation | Directivity | ||
| 1910 | 49 | 49 | 1.671 | 0.004 | 48.02 | 48.02 | 0.055845 | 0.000000 | 0.00 | -29.34 | -81.76 | -52.42 | ||
| 7010 | 49 | 49 | 1.666 | 0.005 | 48.02 | 48.02 | 0.055511 | 0.000001 | 0.00 | -29.37 | -79.82 | -50.45 | ||
| 28010 | 52 | 53 | 1.850 | 0.008 | 54.08 | 56.18 | 0.068450 | 0.000001 | -0.17 | -28.98 | -76.26 | -47.28 | ||
| 50010 | 52 | 53 | 2.132 | 0.013 | 54.08 | 56.18 | 0.090908 | 0.000003 | -0.17 | -27.74 | -72.04 | -44.30 |
下側が FT82-61 での結果です。
50MHz でも 44dB とれています。 (SWR 計としては 25dB 以上なら良い)
正確な信号源があるわけではないので精度というのもあれですが、以下のようになりました。
スペアナの 0dBm 出力と、FT-450D の 40W 出力を使って
solve([2188 * a + b = 2109, 1050 * a + b = 959], [a, b]);
という連立方程式を maxima に解かせてキャリブレーション値を求めています。KX3 の表示電力と出力電力はあんまり信用していないのでキャリブレーションに入れていません。KX3 以外では誤差が10%範囲に納まっています。

30ターンにしたので、カップリングは -29.54dB になっています。アッテネータとあわせて 45.64dB の減衰。-26.36〜61.64dBm (2μW〜1458W)
センサー部分としては十分上出来になったと思います。すくなくとも前回作ったときよりは、かなり良くなりました。
これで I2C 接続の SWR 計ができたことになるので、インターフェイスをうまいこと作ってあげたいという気持ちになりました。
![]()
![]()
![]()
なんとなくもう一台を作りたくなったので作っています。実は基板自体はだいぶ前(数ヶ月以上前)に作っておいたのですが、設計ミスがあったりして面倒なのでちゃんと作りはじめてませんでした。
AD8307を使ってログアンプ検波するバージョンの SWR 計の例があることは知っていましたが、前回はそこまですることはないと思ってとりあえず簡単な方法で作りました。
というのもログアンプは大変高価だからです。秋月でAD8307のDIP版が売っていますが、単価が1100円します。なお DigiKey で買うともっと高価なので、秋月は安いほうです。
(最近知りましたが中華性AD8307というセカンドソース品、というよりコピー品があり、こちらは単価が50円!!と激安のようです。SOICで、ebay で手に入ります)
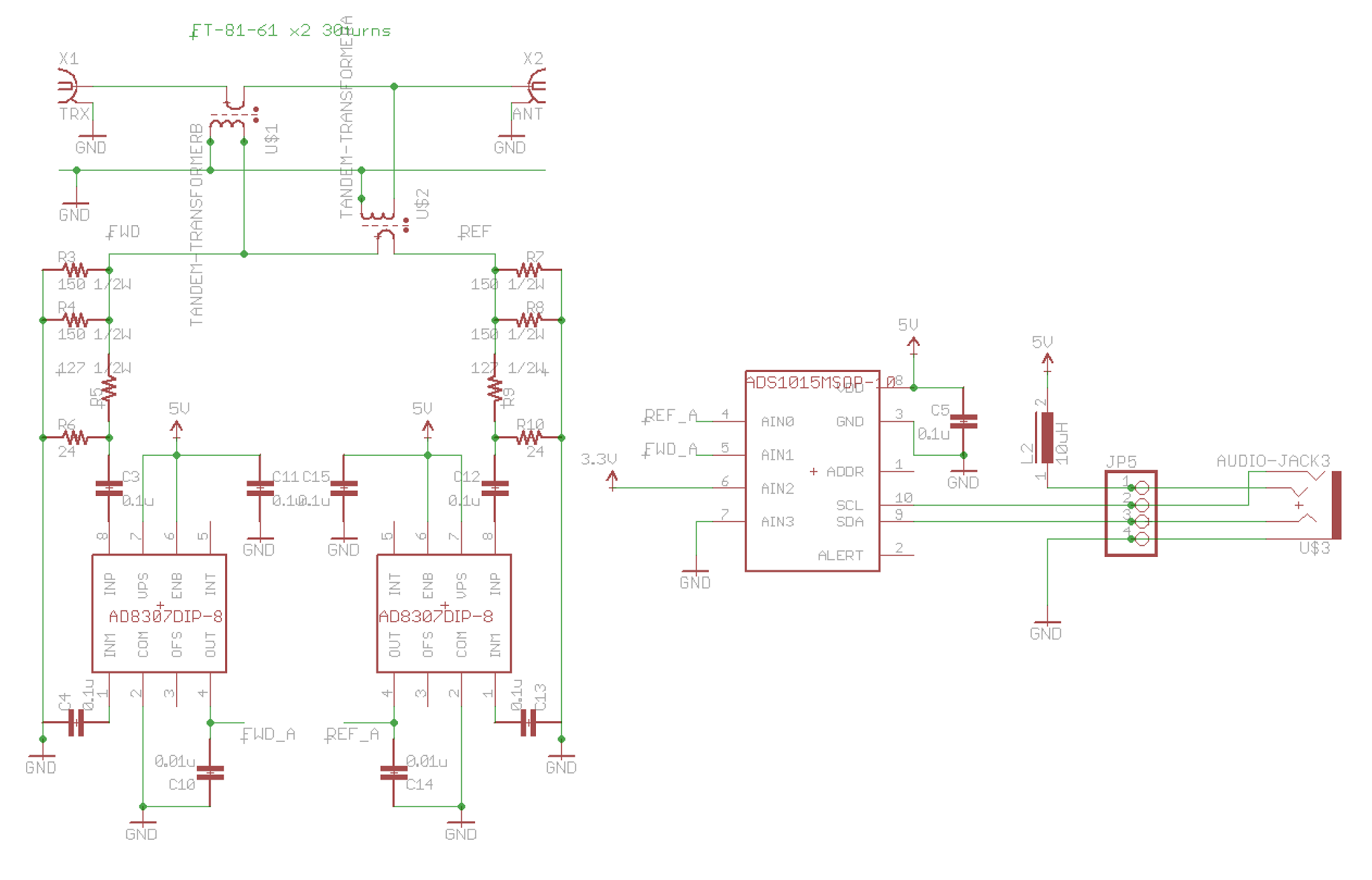
例の回路をほぼ完全にパクって実装しました。
方向性結合器は、タンデムマッチで、FT82-43 を使い、20T にしてみました (26.02dB のカップラに)。線間容量を減らして、高い周波数での特性が改善しないか?と思い巻数を減らしています。#43 は透磁率が高いので、多少巻数を減らしてもインピーダンスは高いままですが、ロスは多くなるはずです。
検波部は結合器からの出力をアッテネータ(16.1dB)を通し、インピーダンス変換を行なって AD8307 に入力しています。AD8307 のオフセットや切片調整はしていないので、25mV/dB の出力にはるはずです。
方向性結合器で 26.02dB、アッテネータで16.1dBなので、AD8307 には 42.12dB 減衰された信号が入力されます。言いかえると、AD8307の入力範囲は -72〜+16dBm ですから、-29.88〜+58.12dBm の入力範囲 (約1μW〜648W) にシフトしたことになります。
ADC は ADS1015 という 4ch + PGA 付き I2C デバイスにしてみました。ここは入手性の問題からオリジナルと違います。
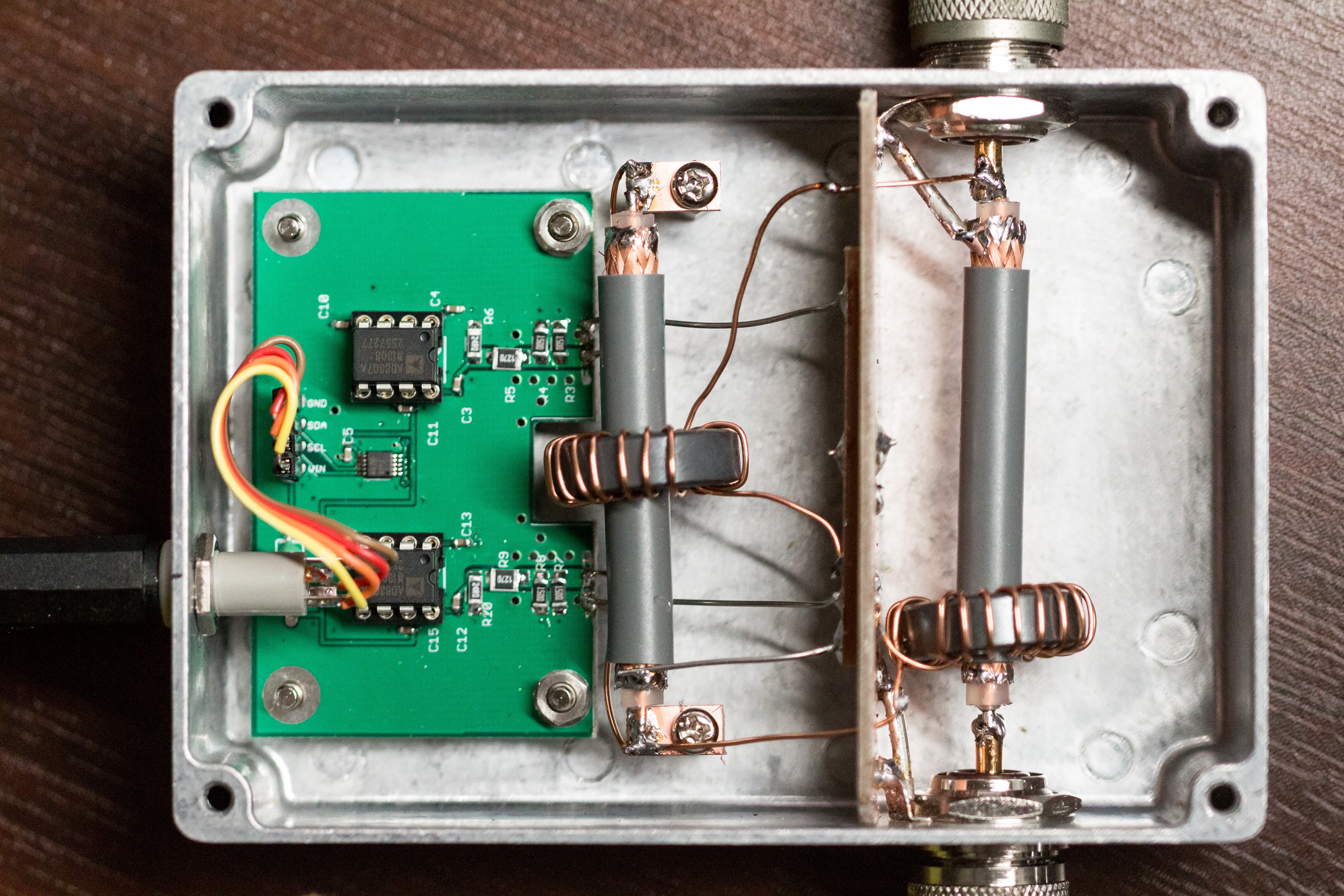
最初は方向性結合器の部分も基板を起こしていましたが、どうも作りにくいので立体配線に変えました。2つのトロイダルコアの間に容量結合防止のためのGNDを立てたいわけですが、プリント基板だとかえって面倒でした。
そんなこともあろうかと、基板を作る段階で途中で切って使えるような感じにしておいたので良かったです。
作ったはいいのですが、どうもうまくいかず悩みました。
一つはコイルを逆付けしていてまともに方向性結合器として動いていなかったのが原因でした。
もう一つはAD8307の出力の問題で、どうしても入力電力から計算される出力電圧が出ず、未だ完全に理由がわかっていません。
最初は 3.3V で動かしていたのですが、どうしても途中から出力電圧が上がりませんでした。定格上では 3.3V でも +10dBm までは入力可能のはずなのですが、-2dBm ぐらいから出力が上がらなくなり、全くよくわかりませんでした。
5V で動かしてみたところ、とりあえずこれは解決したように見えました。
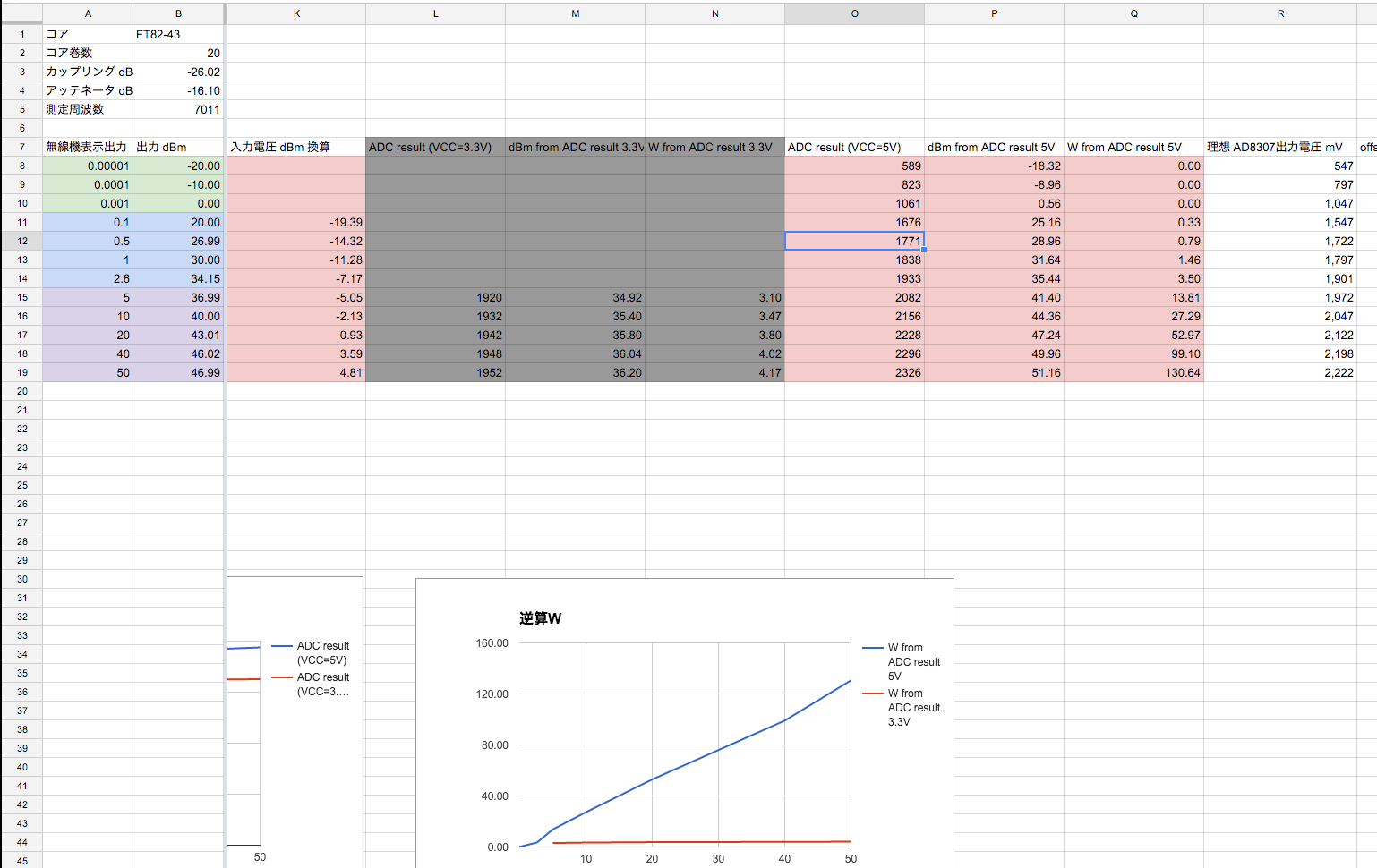
しかし電源電圧を 5V に変えても、入力電力に応じた出力電圧にならず難儀しました。どうしても 25mV/dB の傾きになっておらず、オフセットが含まれているように見えました。切片調整もしていないし、オフセットがどこから入っているのかもわかりませんでした。
結局これはキャリブレーションと称してプログラム上で補正をかけることにしました。どっちにしろ 25mV/dB の傾きは定格上でも 23〜27mV/dB の範囲があるので調整を入れなければなりません。
ということで、適当に係数を求めたら、だいたいそれっぽい値が出るようにはなりました。
正確な電力を計る方法がないので、一定以上は調整しようがありません。
Google Spreadsheet に実測と理想を書いて比較してがんばりました。。。
追記:FT82-61 を使ったバージョンに変更しました。
自作 デジタル SWR 計(再) 2 | 方向性結合器の改善編 | tech - 氾濫原
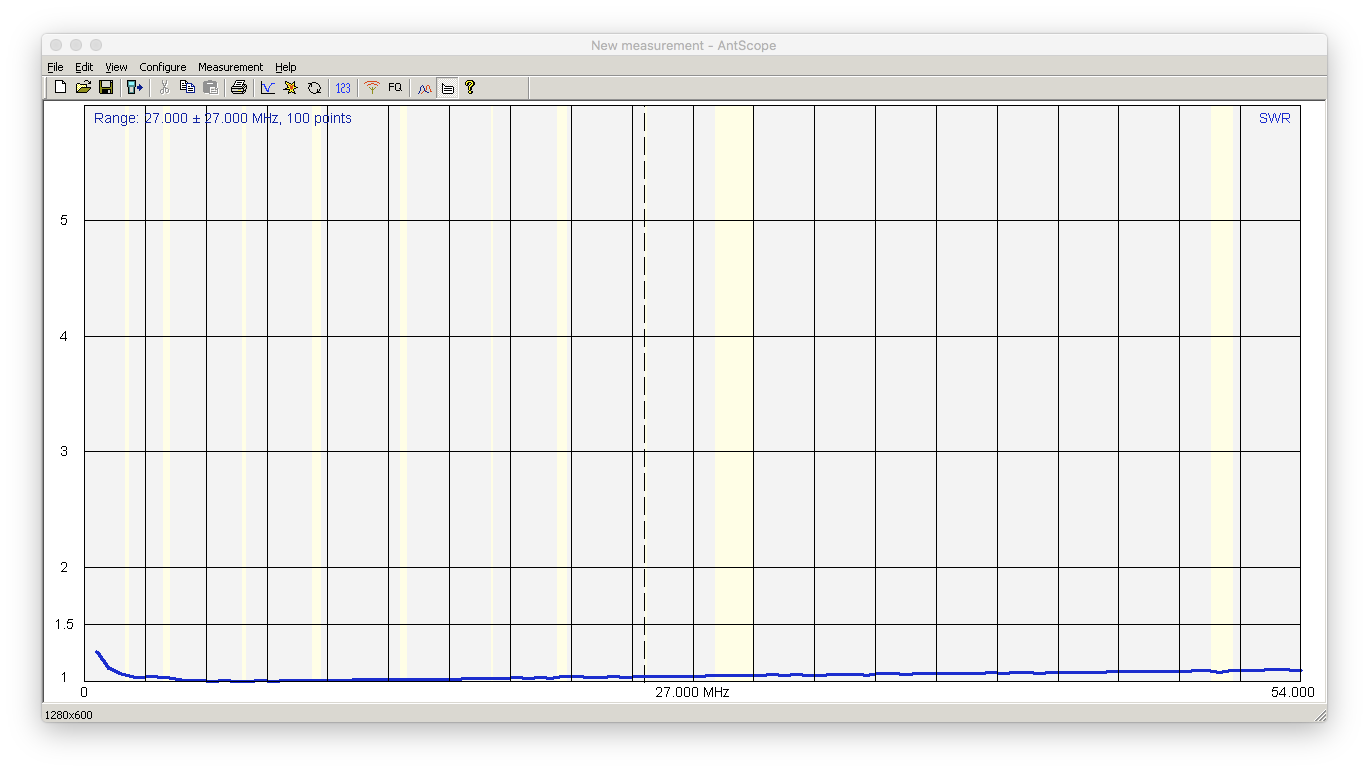
SWR はこんな感じでした
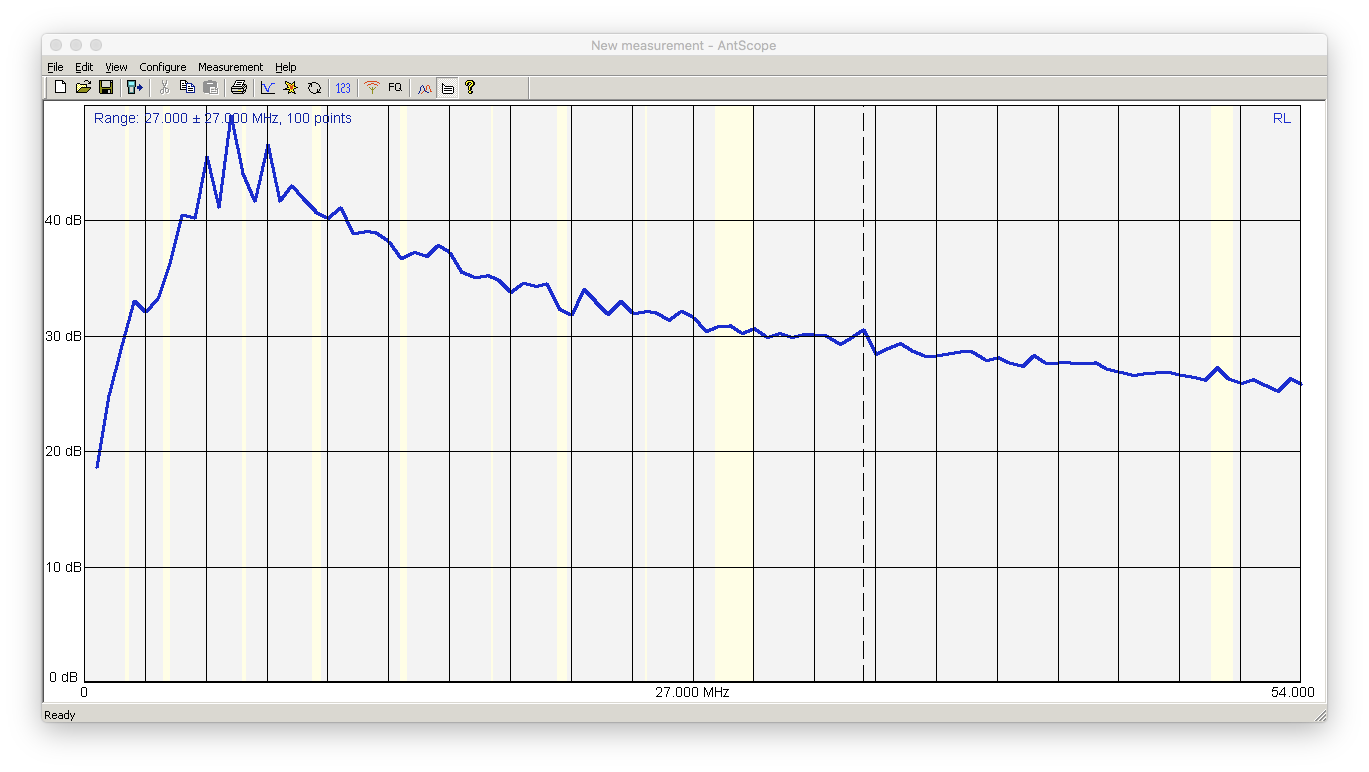
SWR だとよくわからないので、リターンロスでみるとこんな感じです
肝心のディレクティビティなどの特性です。蓋をあけた状態で電圧をオシロで計って50Ω換算で出しています。残念ながら前回作ったものよりも良くありません。

ダイオード検波の場合、微小電力ではダイオードの Vf を超えることができず、それはそのまま誤差になります。
ログアンプ検波することで、ダイオード検波の欠点はなくなり、微小電力から計れるようになりました。具体的には、スペアナのトラッキングジェネレータ出力を 0dBm にして計っても、多少の誤差はありますがちゃんと 1mW ぐらいの値が出てきます。
通常送信機の電力測定ではこんな微小電力まで計れる必要は特にないかと思いますが、SWR 計として反射電力を計りたい場合、SWR が低いときには反射電力も非常に小さくなりますから、ダイナミックレンジの広い測定が必要になります。ダイオード検波と通常のリニアなADCを使うことに対する最大のメリットはここだと思います。
SWR計としてまとめるのではなく、方向性結合器として一旦作って評価をしてから、検波回路を外付けするほうが安定したものが作れそうです。次はそのようにしたいと思います。
インターフェイスはまともに作っていなくて、Arduino で I2C から値を呼んで計算させてシリアルに出力だけさせてテストしていました。今のところまだ実用にはなっていません。
![]()
![]()
![]()
mbed の API 経由でできる以上のことをやろうとする場合、結局 mbed 側で何をやっているか (どのAPIでどのレジスタが変更されるか) は理解していないといけない。
つまり mbed のラッパーのソースコードが手元にないと、プログラムできない。しかし実際のコードがどこにあるのかわかりにくい。
基本的には mbed のライブラリ経由でできることが殆どだとは思うが、例えば高度なスリープを行いたいとか、ウォッチドッグタイマを使いたいとなると、低レベルなレジスタアクセスが必須になる。
Mercurial (hg) のレポジトリとして公開されている。
ghq get https://cho45@developer.mbed.org/users/mbed_official/code/mbed-src/ ghq get https://cho45@developer.mbed.org/users/mbed_official/code/mbed/
してmbed 関係のヘッダと実装を手元に置いておく
メインのレポジトリはこっちなのですが、ヘッダファイルだけ
https://developer.mbed.org/users/mbed_official/code/mbed/file/252557024ec3/TARGET_LPC1114/TARGET_NXP/TARGET_LPC11XX_11CXX/TARGET_LPC11XX
実装は mbed-src にあった。
https://developer.mbed.org/users/mbed_official/code/mbed-src/file/a11c0372f0ba/targets/cmsis/TARGET_NXP/TARGET_LPC11XX_11CXX/TARGET_LPC11XX/system_LPC11xx.c
LPC1114 のリファンレス
http://www.nxp-lpc.com/images/LPC111x_UM_Rev.00.15_Japanese.pdf
NXP による LPC の定数定義
https://developer.mbed.org/users/mbed_official/code/mbed/file/252557024ec3/TARGET_LPC1114/LPC11xx.h
![]()
![]()
![]()

トランジスタ技術 2016年 2月号 cho45
ここ1ヶ月ぐらい GPSDO に興味があって調べていたのですが、先月のトランジスタ技術がまさにGPSの特集だったようでした。
なんか知らずに流行りに乗ったみたいでかっこわるい…… というのはおいといて、おもしろそうなので買って読んでみました。
GPSDO については1記事だけでした。しかしMCUなしでの製作という、男らしい感じなのですが、残念ながらあんまり参考になりませんでした…… 使っているモジュールはちょっと前に買ってみたNEO-6Mで親近感がありました (というか1PPS出せて安いのをebayで探すとこれが最安なので第一候補になるわけですが)
ublox のモジュールは TIMEPULSE ピンに 1PPS に限らず安いものでも10kHzぐらいまで可変で出せるのですが、製作記事でもこの機能を使っていました (MCUを使わないことによる副作用として)。個人的にはこの機能を使うのはいまいちというか、他のGPSモジュールとの互換性がなくなるのがなあと思ってしまいます。
読んでていて疑問に思った点
そもそも基準クロックというのに疎いので根本的なところがよくわかっておらず難しい。
出力を4分配にしているところで、バッファ+トロイダルコアを4つ使って分配しつつ直流的に?アイソレーションしているみたいでしたが、1つのバッファアンプ+ハイブリッドのほうが部品点数は減りそうだけど、うまくいかないのだろうか?とか机上の空論を考えてました。
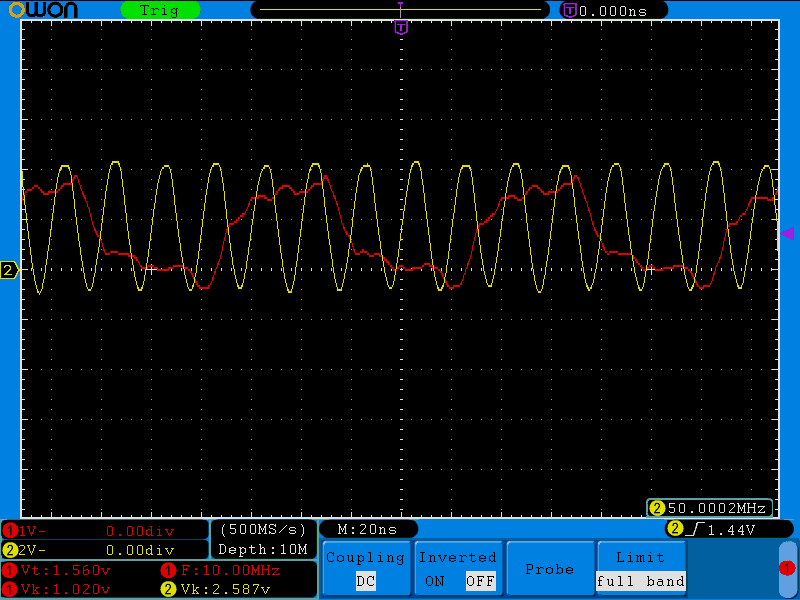
精密なAD変換器のような非常に敏感な回路などではこの問題を避けるために、矩形波の代わりに正弦波をタイミング基準として使用する。
Wikipedia にも書いてありましたが、クロックの高調波の影響を排除するために正弦波を使うんですね。無知でした。
現在 GPS に載っている発振器のほとんどがルビジウムオシレータでびっくりしました。なんとなく全てセシウム原子時計が載っていると思い込んでいました。
![]()
![]()
![]()
AD9851 は Arduino で一度動かしてみましたが、LPC1114/mbed な環境でも動かしてみました。
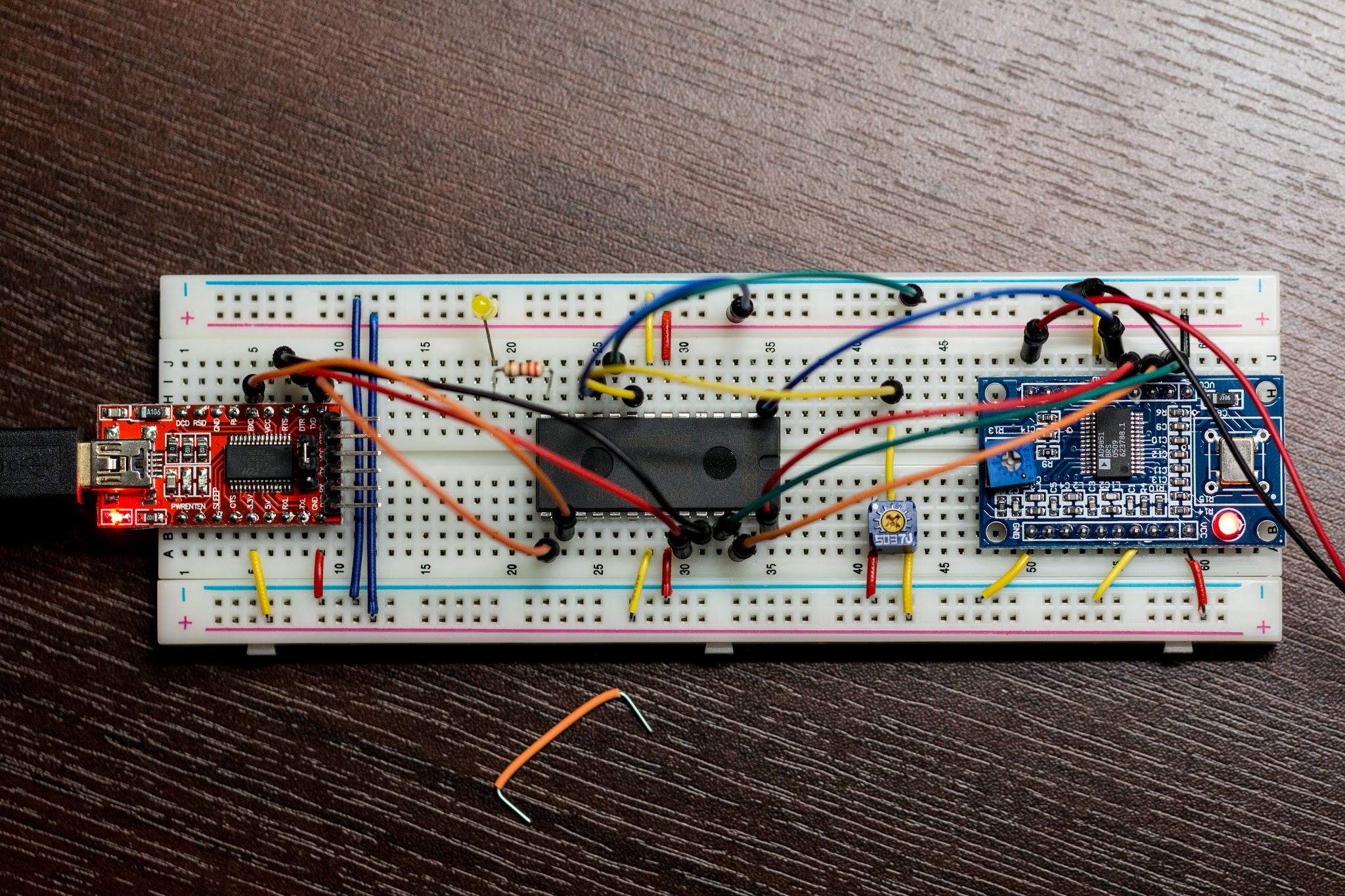
DDS モジュールの定格は5Vですが、3.3Vで動かしてみています。振幅は当然減りますが、ちゃんと70MHzぐらいまでは波形が確認できました。
Arduino のコードとほぼ一緒です。というか殆ど正規表現で置換しただけで動かすことができました。GPIO の操作だけなので本当に頭を一切使わずに移植できました。
GCC かつ -std=c++14 な環境なため mbed のオンラインコンパイラではコンパイルできないと思います (すこし修正すればいけるはずですが C++14 が使えない環境に興味がないので……)
また、なんとなくシリアル経由で周波数を変えるインターフェイスにしてみました。mbed のライブラリに CircularBuffer があるので簡単です。C++ の STL に circular buffer / ring buffer 相当のものがないのが不思議なんですが、いつか入る予定はあるんでしょうかね?
#include "mbed.h"
#include <CircularBuffer.h>
#include <cstdlib>
#include <string>
template <uint32_t CLKIN, bool MULTIPLIER>
class AD9851 {
static constexpr double PHASE_FACTOR = 0x100000000 / (double)(CLKIN * (MULTIPLIER ? 6 : 1));
DigitalOut PIN_DATA;
DigitalOut PIN_FQ_UD;
DigitalOut PIN_W_CLK;
DigitalOut PIN_RESET;
void serial_write(uint32_t freq, uint8_t phase, bool powerdown) {
// freq (delta phase)
for (int i = 0; i < 32; i++) {
PIN_DATA = (freq>>i & 1);
PIN_W_CLK = 1; wait_us(4);
PIN_W_CLK = 0; wait_us(4);
}
// control bits
PIN_DATA = MULTIPLIER ? 1 : 0;
PIN_W_CLK = 1; wait_us(4);
PIN_W_CLK = 0; wait_us(4);
PIN_DATA = 0;
PIN_W_CLK = 1; wait_us(4);
PIN_W_CLK = 0; wait_us(4);
// powerdown
PIN_DATA = powerdown ? 1 : 0;
PIN_W_CLK = 1; wait_us(4);
PIN_W_CLK = 0; wait_us(4);
// phase
for (int i = 0; i < 5; i++) {
PIN_DATA = (phase>>i & 1);
PIN_W_CLK = 1; wait_us(4);
PIN_W_CLK = 0; wait_us(4);
}
PIN_FQ_UD = 1; wait_us(4);
PIN_FQ_UD = 0; wait_us(4);
}
public:
AD9851(
PinName data,
PinName fq_ud,
PinName w_clk,
PinName reset
) :
PIN_DATA(DigitalOut(data)),
PIN_FQ_UD(DigitalOut(fq_ud)),
PIN_W_CLK(DigitalOut(w_clk)),
PIN_RESET(DigitalOut(reset))
{
PIN_DATA = 0;
PIN_FQ_UD = 0;
PIN_W_CLK = 0;
PIN_RESET = 0;
}
/**
* W0 ... W31 -> Freq (LSB first)
* W32, W33 -> Control (for factory test)
* W34 -> Power-Down
* W35 ... W39 -> Phase (LSB first)
*/
void reset() {
// ensure low
PIN_DATA = 0;
PIN_FQ_UD = 0;
PIN_W_CLK = 0;
// reset
PIN_RESET = 1; wait(1);
PIN_RESET = 0; wait(1);
// reset to serial mode
// Pins of D0, D1 = 1, D2 = 0 for serial mode
PIN_W_CLK = 1; wait_us(4);
PIN_W_CLK = 0; wait_us(4);
PIN_FQ_UD = 1; wait_us(4);
PIN_FQ_UD = 0; wait_us(4);
}
void set_frequency(uint32_t frequency) {
set_frequency(frequency, 0);
}
void set_frequency(uint32_t frequency, uint8_t phase) {
uint32_t deltaPhase = PHASE_FACTOR * frequency;
serial_write(deltaPhase, phase, 0);
}
void powerdown() {
serial_write(0, 0, 1);
}
};
AD9851<30000000, true> ad9851(/*data*/dp28, /*fq_ud*/dp26, /*w_clk*/dp25, /*reset*/dp1);
//AnalogIn adc1(dp9);
//AnalogIn adc2(dp10);
//AnalogIn adc3(dp11);
//AnalogIn adc4(dp13);
Serial serial(USBTX, USBRX);
CircularBuffer<char, 80> serial_buffer;
int main() {
serial.baud(115200);
serial.printf("init\n");
ad9851.reset();
ad9851.set_frequency(10e6);
for (;;) {
if (serial.readable()) {
char c = serial.getc();
if (c == 0x0D) continue; // ignore CR
if (c == 0x0A) { // treat LF as line end
std::string line(80, '\0');
line.clear();
char c;
while (serial_buffer.pop(c)) {
line += c;
}
serial_buffer.reset();
serial.printf("GOT: %s\n", line.c_str());
uint32_t new_freq = std::atoi(line.c_str()) * 1e6;
ad9851.set_frequency(new_freq);
continue;
}
serial_buffer.push(c);
}
}
return 0;
} S/digitalWrite\(([^,]+), ([^)]+)\)/\1 = \2/ s/delayMicroseconds/wait_us/g s/delay/wait/g
![]()
![]()
![]()
アマゾンプライムビデオがはじまったのはもちろん知ってはいましたが「PC で見れてもなぁ」と思ってました。PC で動画を見る習慣がないので結局見ません。
しかし PS4 で直接見れることに気付いて、ただただ、最高という気持ちに変わりました。
まぁアマゾンプライムビデオとかは些細なことで、未確認で進行形を見なおしてるんですが、最高です。最高です。小紅は最高に可愛い。
![]()
![]()
![]()
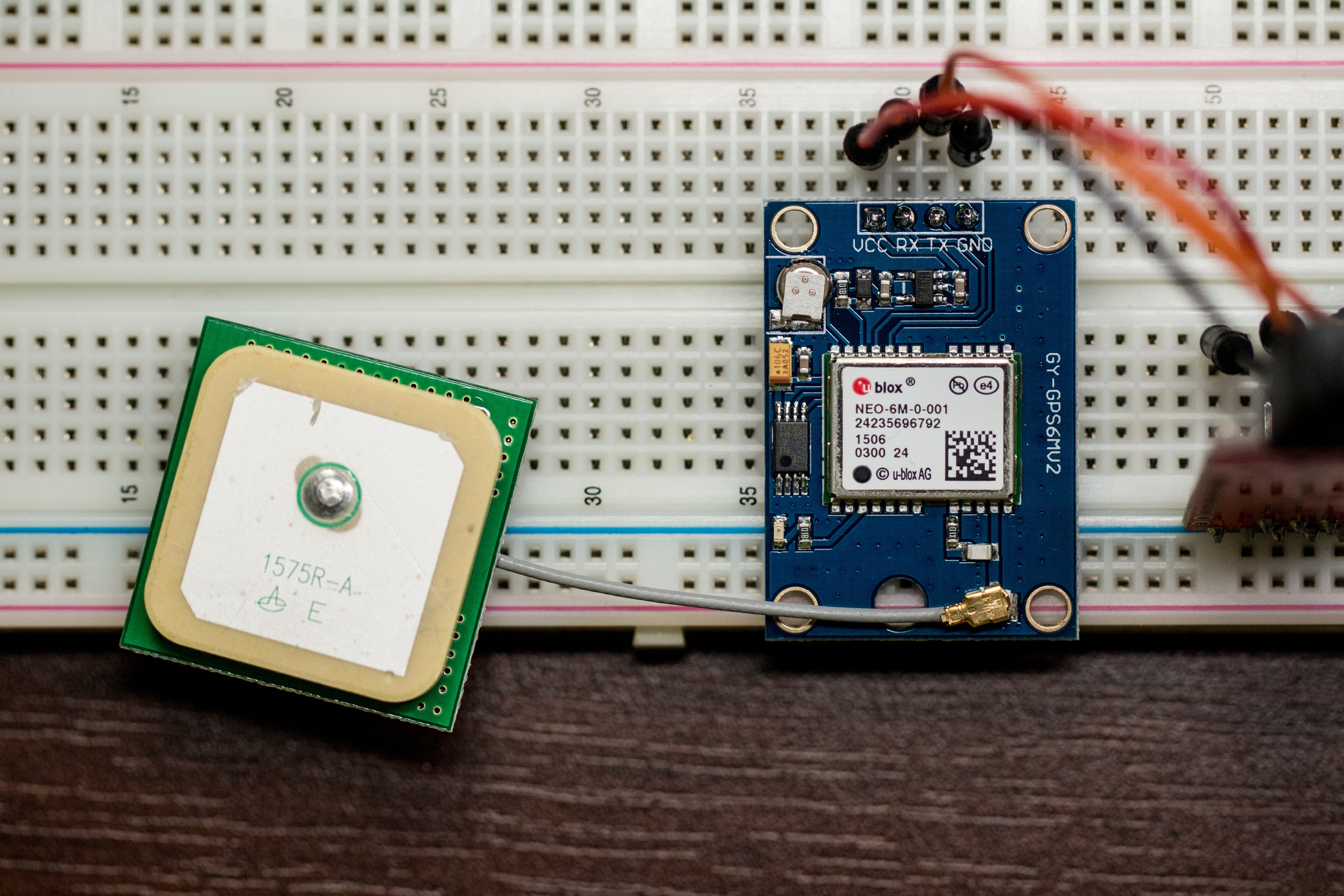
1000円ぐらいで買いました。このモジュールはアンテナが分離型で、1PPS 出力がとれるという特徴があります。
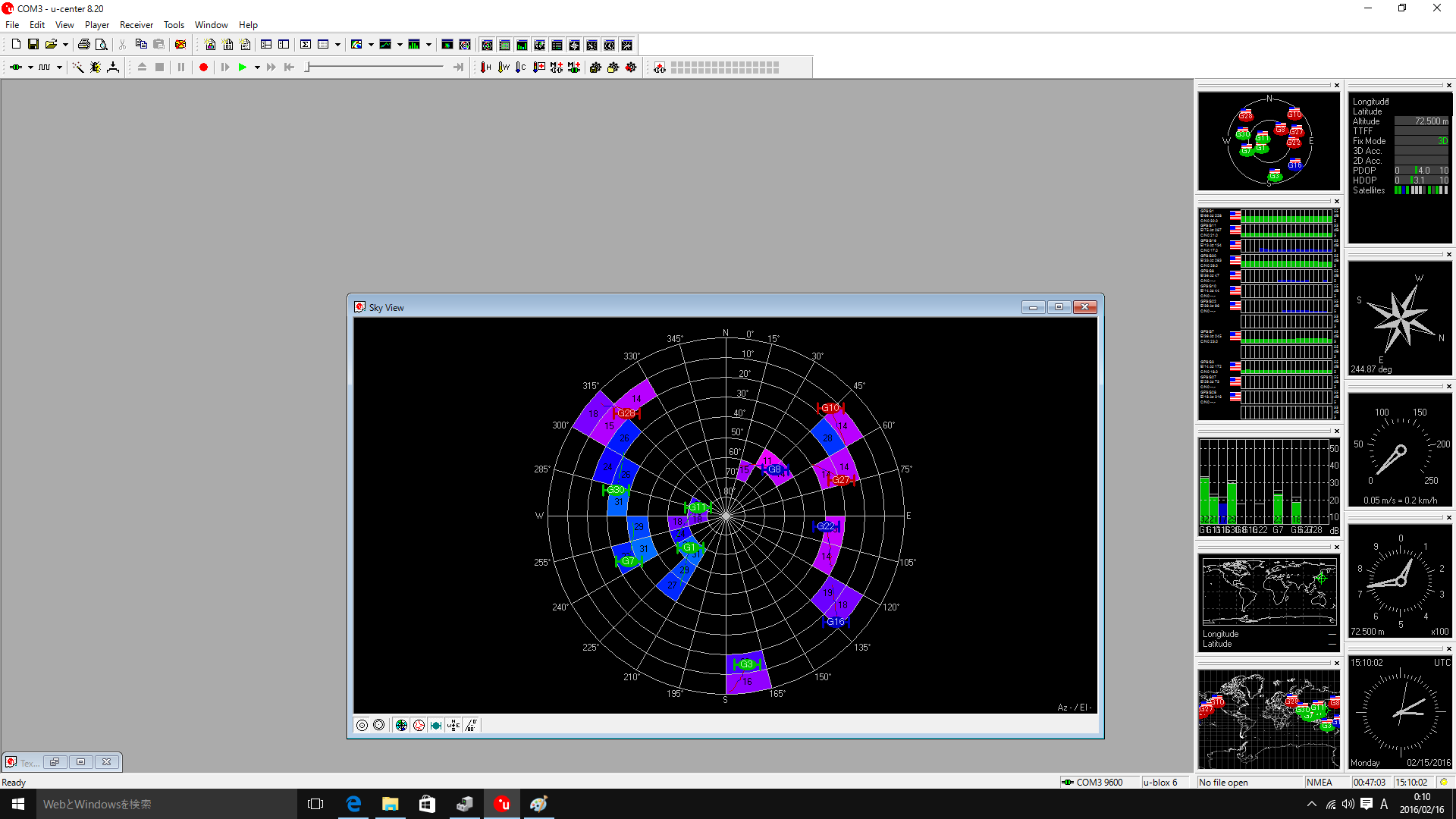
ublox というメーカーのGPSチップが載っています。u-center というソフトウェアから詳細な設定ができることになっています。ただし u-center は Windows のみです。
窓際で受信させてみましたが、いつまで経っても GPS Fix しません。u-center でしばらく眺めていると1時間〜2時間ぐらいでようやく GPS Fix しました。
スマフォ内蔵のGPSだと窓際でもすぐGPS Fixできるので、ちょっと残念なところです。
1度3D Fixまでいけば、割と安定して受信が継続されました。
NEO-6M は GPS(アメリカ)のみに対応していて、GLONASS (ロシア)やQZSS(日本)は対応していないので、そのせいかもしれません。
自宅でGPS使って位置を知れてもあんまり意味がありません。このGPS モジュールの最大の目的は1PPSです。
1PPS (Pulse Per Second) 出力はLED が接続されており、GPS Fix 時には1秒ごとにLEDがフラッシュします。
この1PPSはGPS衛星に搭載されている原子時計と同期しているので、とても正確です。ただし、GPSモジュール内蔵クロックが48MHzなので最大42nsぐらいのジッタはありそうです。そこそこに長い目で見ると原子時計並に正確な1Hzが得られるというものです。
スペック的には以下のようになっています(いまいち各項目の意味がわかりませんでしたが…)

モジュールのピンヘッダに出ていないので、必要なら直接引き出す必要があります。
• For best timepulse performance it is recommended to disable the SBAS subsystem.
日本にはSBASシステムがそもそもないので完全に無効にしときましょう。
特にライブラリとかを使わずに、ちゃんと動いているかだけのテストをできるようにスクリプトを書きました。動かすと以下のような出力になります。
2016-02-16 15:28:5.000Z VALID:YES / 3D Fix [1: 31dB*] [3: 21dB*] [7: 26dB*] [8: 0dB] [10: 0dB] [11: 15dB*] [16: 15dB*] [17: 0dB] [22: 0dB] [27: 0dB] [28: 19dB*] [30: 0dB*]
#!ruby -v
require 'serialport'
@port = SerialPort.new(
"/dev/tty.usbserial-A50285BI",
9600,
8,
1,
0
)
cols = `tput cols`.to_i
status = {
using: [],
sates: {}
}
loop do
while line = @port.gets
type, *rest = line.chomp.split(/,/)
next unless type[0] == '$'
_ = rest.pop
case type
when "$GPRMC"
h, m, s = *rest[0].match(/(..)(..)(.+)/).captures.map {|i| i.to_f }
dd, mm, yy = *rest[8].match(/(..)(..)(..)/).captures.map {|i| i.to_i }
datetime = "%04d-%02d-%02d %02d:%02d:%02.3fZ" % [yy + 2000, mm, dd, h, m, s]
state = rest[1]
status[:UTC] = datetime
status[:is_valid] = state == "A"
when "$GPGGA"
sate_count = rest[6]
status[:sate_count] = sate_count
when "$GPGSA"
mode = rest[0]
type = rest[1] # 1 = invalid, 2 = 2d, 3 = 3d
sate_nums = rest[2, 12]
status[:mode] = mode
status[:type] = type
status[:using] = sate_nums.map {|i| i.to_i }
when "$GPGSV"
total = rest.shift
current = rest.shift
if current == 1
status[:sates] = {}
end
_ = rest.shift # count
until rest.empty?
num = rest.shift
e = rest.shift
d = rest.shift
sn = rest.shift
status[:sates][num] = {
num: num.to_i,
e: e,
d: d,
sn: sn.to_i,
}
end
if total == current
# done
end
else
# ignore
end
out = "%s VALID:%s / %s Fix %s" % [
status[:UTC],
status[:is_valid] ? "YES" : "NO",
status[:type] == "1" ? "NO" : "#{status[:type]}D",
status[:sates].values.sort_by {|i| i[:num] }.map {|i|
"[%s: %ddB%s]" % [
i[:num],
i[:sn],
status[:using].find_index(i[:num]) ? "*" : ""
]
}.join(" ")
]
print "%- #{cols-1}s\r" % out
$stdout.flush
end
end
![]()
![]()
![]()
スマフォで見たとき、ファーストビューがあまりにダサすぎたのでヘッダ部分をちょっとマシにしました。
日記のタイトル部分は SVG にしてみました。そろそろ常用してもいいかなという気持ちです。
PC 側もちょっと変えていて、本文の幅を広告と一致するようにしました。なんで今までズレたまま放っていたのが謎ですがようやくすっきりした気がします……
![]()
![]()
![]()
DIP で唯一実用になる(?) ARM Cortex-M0 マイコンです。SRAM が 4KB しかないのが心許ないですが、秋月で現在180円と、性能の割に激安です。
32bit ARM なので、32bit 演算が多少出てくるような場合は AVR より圧倒的に良い選択そうです。(FPU はありませんが)。また mbed は Arduino よりもライブラリデザインがマトモという印象があります。
platformio でコンパイルして、シリアルアダプタ経由で ISP 書きこみするというのを試しました。フレームワーク(ライブラリ)としては mbed を使っていますが、mbed の開発環境は使っていません。
platformio.ini を以下にようにして
[env:lpc] platform = nxplpc framework = mbed board = lpc1114fn28 build_flags = -std=c++1y
main.cpp を以下にようにしました。
#include "mbed.h"
DigitalOut led(LED1);
int main() {
while(1) {
led = 1;
wait(0.5);
led = 0;
wait(0.5);
}
return 0;
}
この状態で platformio run をすると .pioenvs/lpc/firmware.bin にコンパイル済みバイナリができます。
platformio は mbed の開発環境を前提としているようで、upload では単に upload_port 先のディレクトリにコピーをしようとします。今回はシリアル経由で書きこむので、platformio 経由での upload は使いませんでした。
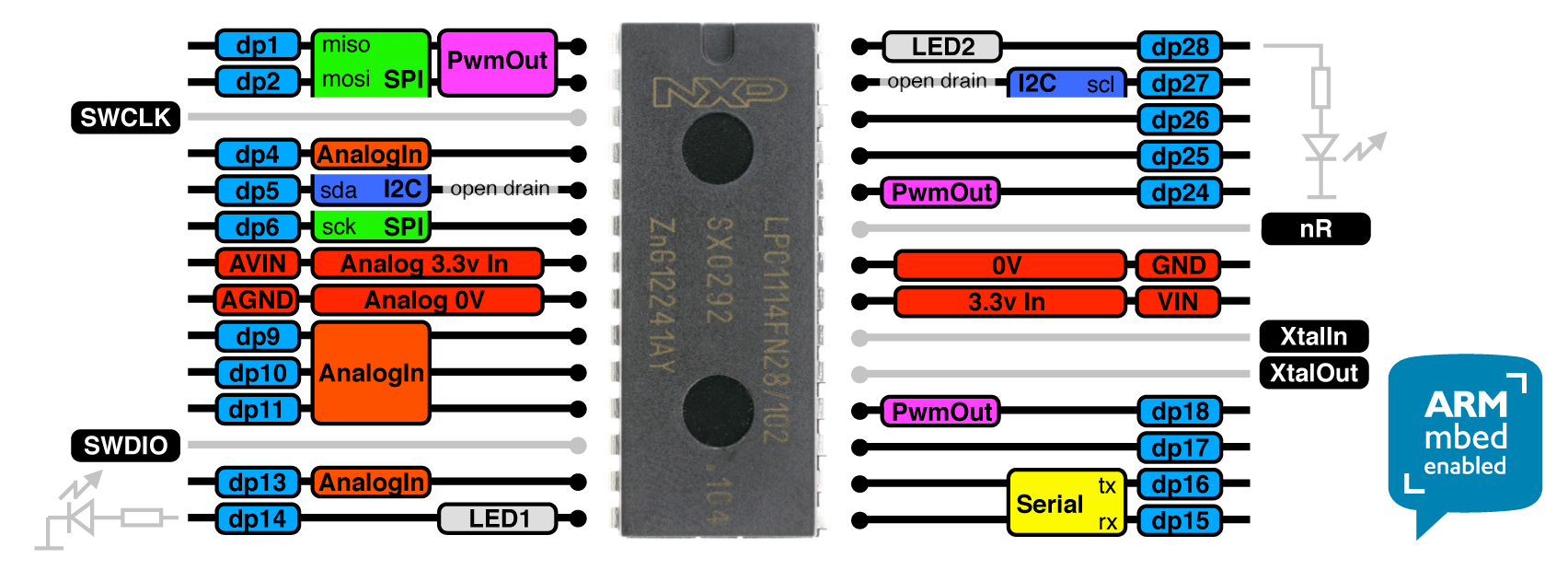
https://developer.mbed.org/platforms/LPC1114FN28/ このページを見るのが一番良いようです。
上記コード中で指定している LED1 は左下の dp14 になります。
書きこみツールは lpc21isp を使うのが一番簡単なようです。展開して make するだけで OS X でも普通に動きました。
https://sourceforge.net/projects/lpc21isp/files/lpc21isp/ からダウンロードできます。
以下にような感じで書きこめました。115200 は書きこみ時のボーレート、12000 はMCUの動作周波数をkHz単位で指定するようです。内蔵RCは12MHzなので12Mhzを指定しています。が、mbed 実行時は逓倍して48MHzで動いているようなので、どっちを指定するのかよくわかりません。
lpc21isp -control -bin .pioenvs/lpc/firmware.bin /dev/tty.usbserial-A50285BI 115200 12000
ここでは -control を指定しています
-control for controlling RS232 lines for easier booting
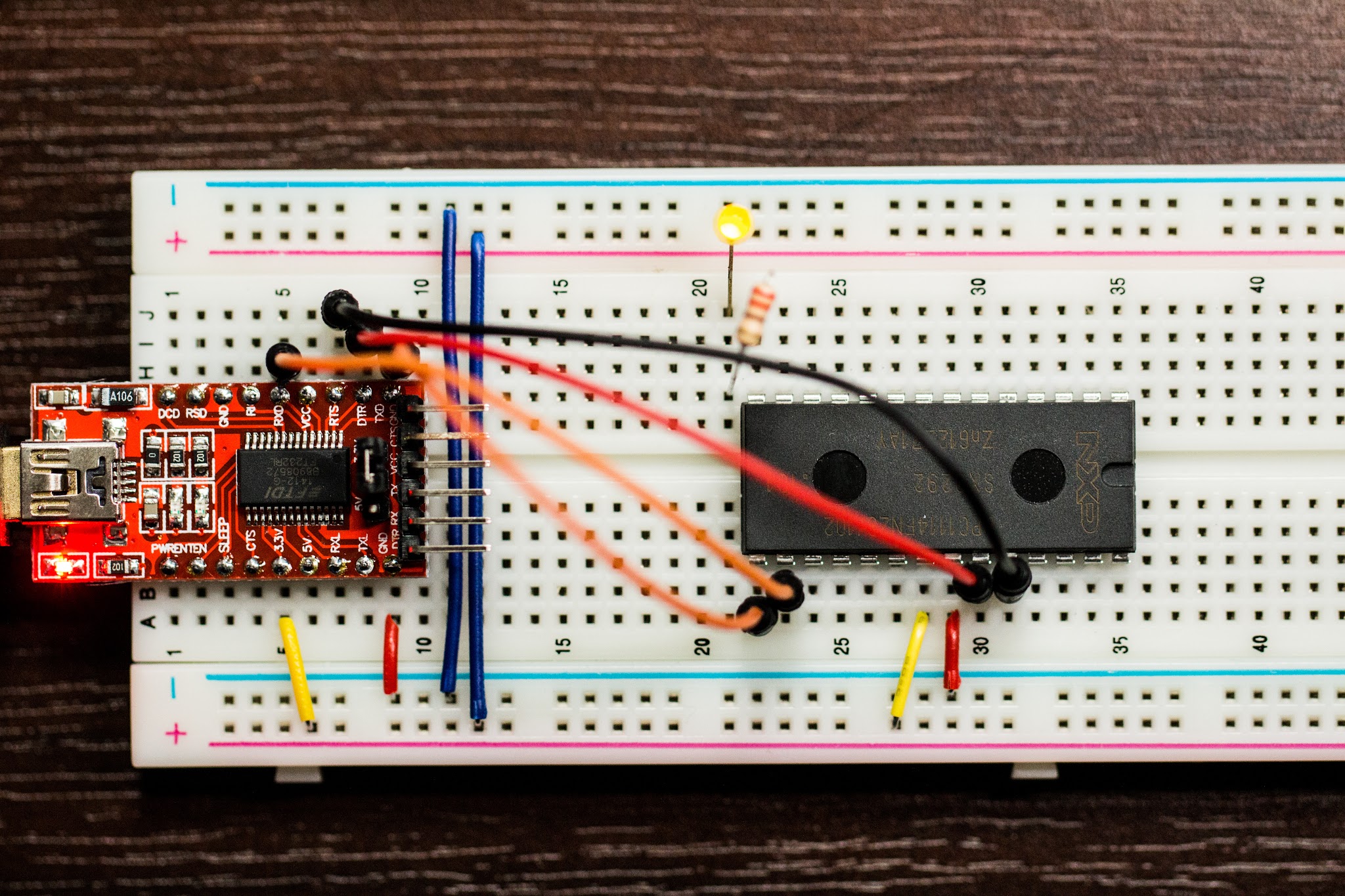
(Reset = DTR, EnableBootLoader = RTS) となっており、この通りにシリアル変換の DTR を nR (RESET) 、RTS を dp24 に接続することで、自動リセットしてISPモードへ移行して書きこめます。冒頭の写真の通りの配線です。
上記の方法だと、普通にシリアル通信を行おうとするとRTS/DTRまわりの挙動によってリセットが発生してISPモードに入ってしまうことがあります。なので普通に screen などでシリアル出力を見ることができません。これは RESET の配線を切れば問題ないのですが面倒くさいところです。
実はこれもlpc21ispを使って以下にようにすると、配線を変えずにシリアルモニタができるようです。
lpc21isp -termonly -control /dev/tty.usbserial-A50285BI 115200 12000
コード例
#include "mbed.h"
Serial serial(USBTX, USBRX);
DigitalOut led(LED1);
int main() {
serial.baud(115200);
while(1) {
serial.printf("Hello, World!\n");
led = 1;
wait(0.5);
led = 0;
wait(0.5);
}
return 0;
} ref.
![]()
![]()
![]()