技術力がないから奇行に走る
アルゴリズムを原理から実装するみたいなのが相変らずできないわけだけど、そうでないものなら比較的すぐに実装を書けるようになってはきているので、普段の生活でちょっとしたハックみたいなのはコストパフォーマンスが非常に高く、やっていて面白い。
なんとなく以下らへんのスキルを Lv 7/10 ぐらい (Lv5 でギリギリ実用、みたいな) まで上げれたら上から下までできます!!って言えそうだけど、だいぶ遠く感じる。書いたレベルは現状の甘めの自己評価です。スキルポイントが足りてないんで、スキルシミュレーターとかが欲しいですね。
- ウェブのフロントエンド (JS, HTML, CSS)
- Lv7
- ウェブのサーバーサイド (Ruby, Perl, JS)
- Lv7
- サーバーミドルウェア (httpd, memcached etc...)
- Lv5
- ネットワーク (ルーティングとか、ネットワーク冗長性とか)
- Lv3
- OS (マルチタスクとかメモリ管理とか)
- Lv2
- ハードウェアドライバ (OS 上で USB のドライバを自力で書くとか)
- Lv2
- ハードウェア組み込み (OS なしでハードウェアIOを叩くとか)
- Lv2
- 電子回路 (特にデジタル回路・デジタル回路実装に必要なアナログ回路の知識)
- Lv2
ネットワークとかミドルウェアあたりは、会社にいると専門の人がいるから自分でほぼやることはなくて、あんまりスキルあがっていかない。それと独学だと解決すべき大きな問題が発生しないので、スキル上げしにくい。パーティプレイ必須はぼっちプレイヤーにはつらい。
ハードウェア以下の低いレイヤーは、全く仕事の役には立たないけどモチベーションは比較的高く、解決したいちょうどいい問題が結構ころがっているのでソロプレイでもスキル上げしやすい感じがする。ただ、一定以上からパーティプレイ必須で、ソロだと決して上がらなそう。
ウェブよりのレイヤーはソロプレイでスキル上げしやすい。わからないことは結局ソース見たら解決するし、バグってるの見つけたら pull-req する、みたいなのでレベルが上がっていく。
なので、ソロで上げれる限界的には Lv10, Lv10, Lv7, Lv5, Lv6, Lv5, Lv5, Lv6, Lv7 みたいな感じになりそう。
関連エントリー
- ✖ ハードウェア部分は、人間が工夫して設計しているとはいえ、基本は物理現象(電子の動き)を利用していて、それが自分には不思議で面白い。ソフトウェ...
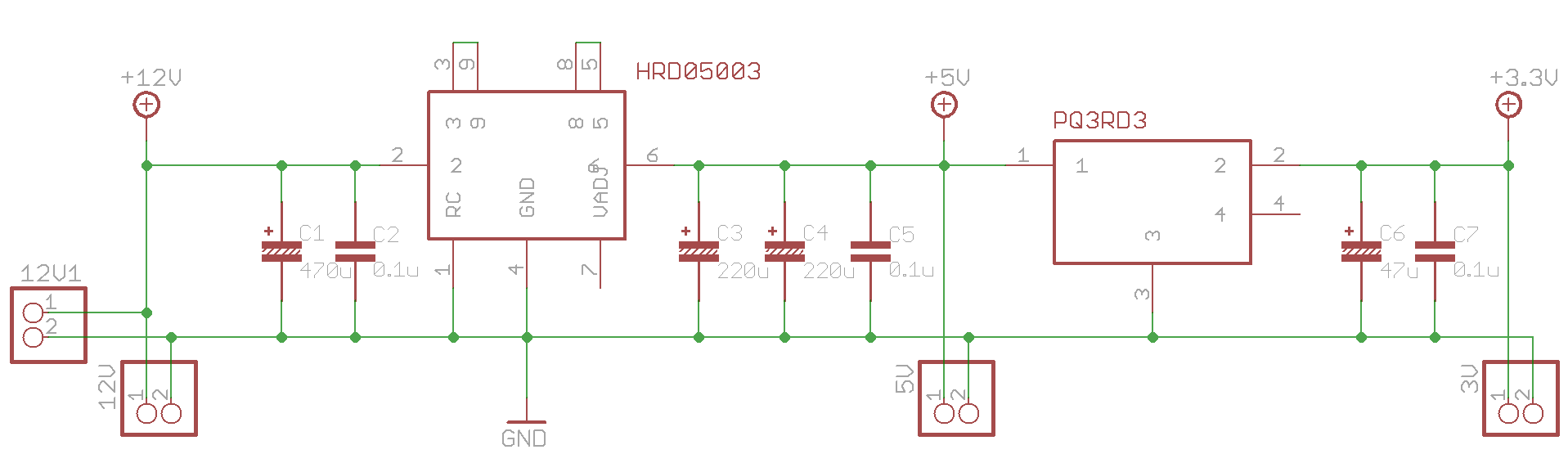
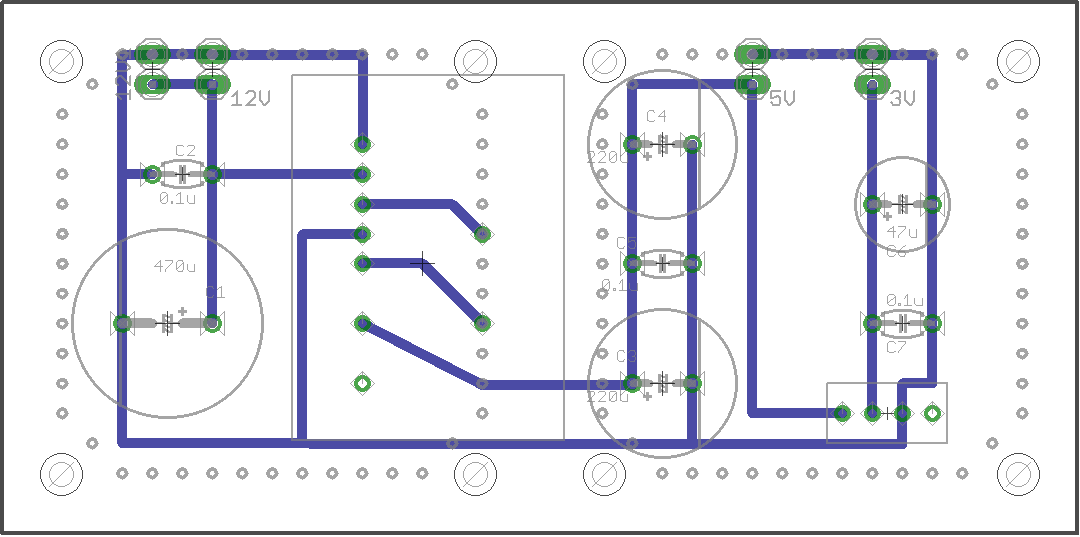
- ✖ そういえば最近8年前に作って放置していたヘッドフォンアンプを修理して使いはじめた。ネットで回路図が公開されていた SAITAMA なんちゃら...
- S-A-A-2 (NanoVNA V2) を手に入れてみた NanoVNA V2 という名前で開発されているが、ややこしいので開発コードである S-A-A-2 (Simple Antenna Anal...
- 自作アンテナアナライザーのBluetooth化とアプリケーション 簡単かつ安く高精度なアンテナアナライザーを自作したい | tech - 氾濫原 簡単かつ安く高精度なアンテナアナライザーを自作したい (2)...
- 『JavaScriptから現実世界に干渉する7の方法: ブラウザでハードウェアをコントロールする技術』という本を書いた JavaScriptから現実世界に干渉する7の方法: ブラウザでハードウェアをコントロールする技術という本を書いてみた。前々からこのテーマで...






{kind=link}